سلام دوستان من دانشجوی سال آخر مخابرات هستم پروژه کارشناسی من در مورد رادار سونار(رادار زیر دریایی) است از دوستان میخواستم که کمکم کنید اگر پروژه ای یا مقاله ای در مورد این موضوع دارید در اینجا قرار دهید ممنون .


 کاربر سایت
کاربر سایت
سلام دوستان من دانشجوی سال آخر مخابرات هستم پروژه کارشناسی من در مورد رادار سونار(رادار زیر دریایی) است از دوستان میخواستم که کمکم کنید اگر پروژه ای یا مقاله ای در مورد این موضوع دارید در اینجا قرار دهید ممنون .
کاربر سایت
عناوین :
- 1. تاریخچه
- 2. سونار فعال ( active sonar)
- 2.1 آنالیز داده های سونار فعال
- 2.2 سونار و حیوانات دریایی
- 3. سونار غیر فعال ( passive sonar )
- 3.1 سرعت صوت
- 3.2 شناسایی منبع صدا
- 3 .3 نویز (noise )
§ سونار در جنگ
§ فیشرایزهای اکوستیکی (Fisheries Acoustics)
§ کاربرد فیشرایزهای اکوستیکی ( Fisheries Applications)
توجه مهم : به علت عدم پیدا کردن معادل های فارسی مناسب برای برخی از واژه ها و اصطلاحات انگلیسی ، واژه مورد نظر عینا تلفظ گردیده و یا معادل فارسی مورد نظر در قسمت واژه نامه توضیح داده شده است .
سونار :
سونار (sonar) ، ناوبری و تشخیص فاصله توسط صوت ( sound navigation and ranging) ، تکنولوژی است که با استفاده از انتشار صدا در زیر آب قادر به شناسایی دیگر ناوها یا کشتی ها است . در انگلستان این تکنولوژی با نام ASDIC ( 1948) شناخته شده است .
- تاریخچه :
در سال 1906 ، اولین سونار غیر فعال جهت شناسایی توده های یخ توسط لوییس نیکسون اختراع گردید . در جنگ جهانی اول به علت نیاز به شناسایی اهداف دریایی تمایل به استفاده از سونار افزایش یافت . پاول دانکوین فرانسوی به همراه کنستانتین چلوسکی روس موفق به اختراع اولین سونار فعال در سال 1915 شدند . اگرچه مبدل های پیزوالکتریک نسبت به این سونار ترجیح داده شدند ، اما در جای خود این نوع سونارها آینده روشنی را در علم رادار شناسی باز کردند .
در سال 1916 زیر نظر بخش تحقیقاتی و اختراعات ناوگان دریایی بریتانیا ، رابرت بویل ( فیزیکدان کانادایی) ، پروژه ای را بر عهده گرفت و با تشکیل کمیته تحقیقاتی تشخیص ضدزیر دریایی ( یا زیردریایی )، (anti
or alied)) submarine detection investigation committee ) موفق به ساخت نمونه آزمایشی شدند که با نام مخفف ASDIC شناخته می شود .
درسال 1918 انگلیس و ایالات متحده متفقا موفق به ساخت سیستم های مجهز به سونارفعال گشتند ، ودرسال 1923 تولید این نوع سیستم ها به طور رسمی آغاز گشت . تکنیک تشخیص نابودگرهای سیستم هایی که مجهز به تکنیک ASDIC بودند در سال 1922 ساخته شد .
پس از جنگ جهانی دوم ناوگان آمریکا اقدام به تولید کشتی ها و زیر دریایی های که دارای فناوری معروف به ماهی کوچک بودند ، کرد .
- سونار فعال ( active sonar) :
سونار فعال با ایجاد پالس های صوتی (معروف به پینگ) ، وسپس گوش دادن به پالس بازگشتی عمل میکند . برای تشخیص فاصله از هدف ، شخص می تواند مدت زمان بین دریافت و ارسال پالس را اندازه گیری کند. برای اندازه گیری جهت و راستای هدف می توان از هیدروفونیک های متعدد (hydrofonic) استفاده کرده ، و سپس زمان دریافت پالس توسط هر یک از این هیدروفون ها را اندازه گرفت ، و با مقایسه این زمان ها به راحتی می توان جهت و راستای هدف را تعیین نمود .
پالس ارسالی ممکن است دارای فرکانس ثابت بوده یا دارای چهچهه ای (chirp ) از تغییرات فرکانس حامل باشد . درحالت دوم ما شاهد تغییر نامطلوب در بسامد حامل موج پیوسته هستیم . و میتوان از روش فشرده سازی برای دست یابی به سیگنالی با باند باریک و عاری از فرکانس های نامطلوب استفاده کرد . درعمل هنگامی که سیگنال ما از نوع چهچهه ای است مدت زمان دریافت سیگنال افزایش میابد . در نتیجه ما سیگنال دریافتی را با انرژی کمتری نسبت به زمانی که سیگنال ما دارای یک فرکانس بود دریافت می کنیم . در حالت کلی رابطه بین فرکانس و مسافت بدین صورت است که برای مسافت های طولانی از فرکانس های ضعیف تری استفاده می شود .
در یکی از موارد کاربردی ما از این سونار به عنوان چراغ قوه استفاده می کنیم . از یکی از نقاط زیر زیردریایی یا کشتی سنسور به درون آب فرستاده شده و می تواند فواصل خواسته شده را اندازه گیری کند .یگی دیگر از کاربردهای سونار فعال در شناسایی توده ماهیهای درون آب است . یکی دیگر از کاربردهای سونار فعال درعملیات نظامی می باشد و این سونار قادر به ایجاد یک تصویر سه بعدی با وضوح بالا ازمحیط اطراف سونار می باشد .با این وجود از این نوع سونار در عملیات جاسوسی مورد استفاده قرار نمی گیرد .درادامه کاربردهای این نوع سونار را به طور دقیق تر مورد بررسی قرار می دهیم .
از سونار فعال می توان در اندازه گیری عمق دریا استفاده کرد ، که این عملکرد معروف به عمق سنجی آکوستیکی ( echo sounding) است .
از سونارهای فعال معمولا در اندازه گیری مسافت بین دو پاسخگر (transponder ) استفاده میگردد . پاسخ گر وسیله ای است که قادر به دریافت و ارسال پالس های نوع اول ( فرکانس ثابت ) می باشد . ونیز هنگامیکه این پاسخ گر پالسی را دریافت می کند بسته به میزان انرژی پالس دریافتی از خود عکس العمل نشان میدهد . برای اندازه گیری مسافت یکی از پاسخ گرها اقدام به تولید پالس می کند سپس به اندازه گیری مدت زمان ارسال به پاسخگر دیگر و دریافت پالس می پردازد .حال کافی است تنها سرعت صوت ( پالس ارسالی ) را درون آب بدانیم . یعنی در اینجا مدت زمان طی مسافت بین دو پاسخگر اندازه گرفته شده و در سرعت پالس در آب ضرب می کنیم تا مسافت بین دو پاسخگر بدست آید . با بکارگیری پاسخگرهای متعدد ما قادر به شناسایی نسبی موقعیت های اجسام ثابت و متحرک درون آب هستیم .
- آنالیز داده های سونار فعال :
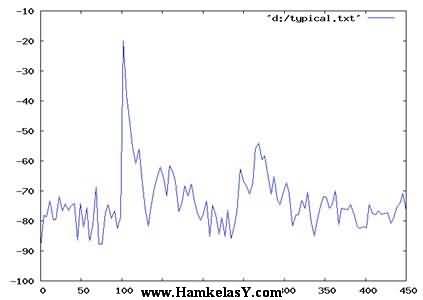
داده های کسب شده توسط سونار فعال با اندازه گیری صوت مشخص شده ، برای یک پریود زمانی کوچک پس از ارسال پینگ ، بدست می آید . مسافتی که پالس تا کف دریا یا هر جسمی که دارای خاصیت بازتابش آکوستیکی ( acoustic reflection) است می تواند با اندازه گیری زمان سپری شده بین ارسال پالس و تشخیص هدف انجام می گیرد . سایر ویرگی هایی راکه می توان از شکل پالس بازگشتی دریافت کرد به صورت زیر است :
- در هنگام ارسال پالس به کف دریا یا اقیانوس ، برخی از پالس های بازگشتی با برخورد به فصل مشترک بین آب دریا و محیط خارج از آب مجددا بازتاب پیدا می کنند و برای دومین بار ازکف دریا بازتابیده می شوند . این امواج بازگشتی حامل اطلاعاتی است که بیانگر میزان خاصیت آکوستیکی آن ناحیه ازکف دریا می باشد .
- بسته به میزان ناهمواری کف دریا ما شاهد زمان های متفاوتی از بازکشت پالس ارسالی خواهیم بود . برای زمانی که کف دریا صاف است ، اغلب موج های بازگشتی در یک مسیر باز تابیده میشوند در نتیجه ما شاهد اطلاعاتی حاکی از وجود گیاهان نوک تیز (sharp spike ) درکف دریا هستیم . برای سطوح با ناهمواری بیشتر موج های بازگشتی گستره وسیع تری را به خود اختصاص میدهند ، و بعضی از پالس های بازگشتی پس از چند بازتابش که ناشی از ناهمواری سطح کف دریا میباشد به سونار بازمیگردند .درنتیجه کاهش میزان گیاهان نوکتیز در داده ها بیانگر سطح ناصاف کف دریا می باشد .
o سونار وحیوانات دریایی :
بعضی از حیوانات دریایی نظیر وال ها و دلفین ها ، از سیستمی مشابه سیستم سونار ( پژواک مکانی ) جهت شناسایی دشمنان و نیز شکارها ی خود استفاده می کنند . اما خطر اینکه فعالیت سونار سبب تداخل و اغتشاش در مسیریابی حیوانات میشود وجود دارد ، وشاید از تغذیه مناسب و جفت گیری آنها جلوگیری کند . گزارش اخیر منتشر شده در ژورنال nature بیانگر تاثیر عملکرد نظامی سیستم های سونار در بیماری ودر نتیجه به ساحل آمدن وال ها بود . سونار های فعال که از ارسال پالس برای شناسایی اهداف خود استفاده می کنند به طور غیر مستقیم حیات حیوانات دریایی را به خطر می اندازند ، اگرچه تحقیقات علمی مجموعه ای از این عوامل را موثر می داند . در سال 2000 ، آزمایشی در ناوگان آمریکا با استفاده از فرستنده ای با قدرت 230db ودر فرکانس بین 3-7 khz بر روی 16 وال ها انجام گرفت که منجر به مرگ 7 وال گردید . با این وجود در صورتی که قدرت پالس های ارسالی کم باشد خطری حیات پستانداران دریایی را تهدید نمی کند .
§ سونار غیر فعال (passive sonar) :
در این نوع سونار ها تنها عمل گوش دادن (و عدم ارسال پالس ) انجام می شود . ازکاربردهای مهم این سونار می توان به عملیات جاسوسی که از این سونار بهره می برند اشاره کرد .
o سرعت صوت :
عملکرد سونار وابسته به سرعت صوت می باشد . سرعت صوت در آب های شیرین آهسته تر از سرعت صوت در آب دریا می باشد . در تمامی آب ها سرعت صوت وابسته به چگالی آب می باشد . چگالی وابسته به پارامترهایی نظیردما واملاح آب ( معمولا میزان شوری آب ) و فشار میباشد . سرعت صوت به طور تقریبی برابراست با :
که از رابطه بالا جهت فرآیندهایی از قبیل تغلیظ آب و تعیین عمق آب استفاده می شود . دمای آب متناسب با عمق آب از سطح دریا تغییر می کند . اما در عمق 30 تا 100 متری از سطح دریا شاهد تغییرات قابل توجهی هستیم . که به این محدوده دما شیب (themocline) گفته می شود که حد واسطی بین آب گرم تر و آب سردتر است که امواج صدا در این ناحیه طوری خم می شوند که زیر دریایی ها می توانند با پنهان شن در زیر این ناحیه از آشکارشدن بگریزند .temperature (in °F)) + (0.0182 × depth (in feet) + salinity (in parts-per-thousand))
دما شیب مکن است در آبهای سطحی نزدیک ساحل نیز وجود داشته باشد که ما از منظور کردن آن صرف نظر میکنیم .
فشار آب اغلب بر نحوه انتشار صوت اثرگذار است . افزایش فشار باعث افزایش چگالی شده که در نتیجه شاهد افزایش سرعت صوت می باشیم . افزایش سرعت صوت منجر به منکسر شدن آن در برخورد با محیط دیگر می شود .که به آن قانون شکست اسنل گوییم .
امواج صوتی که در جهت پایین به سمت کف اقیانوس تابانده شده بودند به صورت قوس هایی که وابسته به فشار آب میباشند به طرف سطح آب بازتابیده می شوند . اقیانوس باید لا اقل دارای عمق 6000 فوتی باشند یا اینکه امواج به جای اینکه انکسار یابند به طرف بالا پژواک شوند . تحت این شرایط امواج در محدوده ای نزدیک سطح دریا فوکوس میشوند و مجددا به طرف پایین انکسار می یا بند ( به صورت قوس ) هر یک از این قوس ها با نام ناحیه همگرایی ( convergence zone) شناخته می شود . قطر نا حیه همگرایی بسته به دمای آب و میزان املاح آب می باشد .
برای مثال در آتلانتیک شمالی قطر ناحیه همگرایی که به فصل ندازه گیری وابسته بود و به صورت دایره های متحدالمرکز شناخته می شد برابر 33 مایل به دست آمد . در ضمن امواج شناسایی شده در صورتی که دارای خط مستقیم بودند مسافت کمی را به خود اختصاص ددند اما در حالت دوم در فواصل بیش از 100 مایلی قابل شناسایی بودند . با توجه به عواملی از قبیل مسافت دما و موانع راه سیگنال دریافت شده توسط گیرنده دارای انرژی بسیار ضعیف تری نسبت به حالت اولیه بودند که این مشکل با استفاده از سونار های دقیق حل شد .
o شناسایی منبع صدا :
سونارهای نظامی زا راه های متعددی برای شناسایی منبع صوت استفاده می کنند . برای مثال ناوگان ایالات متحده از سیستم هایی که با جریان متناوب 60hz کار می کنند بهره می برد . در صورتی که ارسال کننده ها بر روی بدنه کشتی و با ایزولاسیون کامل سوار شده باشند یا اینکه در آب شناور شده باشند یک صوت با فرکانس 60 hz می توان از ژنراتورهای زیردریایی جهت کمک به تعیین اشیاء که اطراف زیردریایی هستند ساتع شوند . به طور قرار دادی اکثر زیردریایی های اروپا از فرکانس 50hz جهت توان سیستم های خود استفاده می کنند . نویز های ادواری نظیر پیچ ها یا تکان هایی که در زیردریایی هنگام افتادن در آب می کنند نیز برای سونار نیز قابل شناسایی است .
سیستم های سونار غیر فعال دارای اطلاعات بسیار مفیدی برای رادار هستند . با این وجود اغلب طبقه بندی های انجام شده به طور دستی و توسط اپراتور انجام می پذیرد . سیستم های کامپیوتری مکررا از اطلاعات پایه جهت تشخیص طبقه بندی کشتی ها سرعت کشتی نوع سلاح استفاده شده و حتی کشتی های خاص استفاده می کنند . داده های طبقه بندی شده مرتبا توسط ناوبر به روز میشود تا اشتباهی در دریافت اطلاعات رخ ندهد .
o نویز (noise ) :
سیستم های سونار غیر فعال به علت اغتشاشی که توسط وسیله نقلیه ایجاد می شود دارای محدودیت های بسیار هستند . به این دلیل اغلب زیر دریایی ها دارای واکنش پذیری هسته ای هستند که در نتیجه بدون استفاده از پمپاژها به راحتی می توانند سرد شوند و از انتقال دهنده های گرمای بی صدا یا استفاده از سوخت های فسیلی یا استفاده از باتری هایی که در تمامی حالات می توانند به طور بی صدا به فعالیت بپردازند استفاده کنند . وسایل انتقال دهنده مناسب با کمترین نویز ساتع شده به صورت دقیق طراحی و ماشینیزه می شوند . این انتقال دهنده های مناسب در سرعت های بالا تنها حبابهایی را درون آب ایجاد می کنند و همچنین صدای خفیفی ایجاد میکنند هیدروفونهای سونار های فعال به طور مستور به بدنه کشتی یا زیر دریایی یدک کشیده می شوند تا تاثیر نویز حاصل شده ناشی از خود زیردریایی کاهش یابد . این هیدروفون ها بسته به کاربرد آن ها می توانند در بالای محدوده دماشیب یا پایین آن یدک کشیده شوند .در سالهای زیادی ایالات متحده اقدام به ساخت و جایگزینی سونار های پسیو متعدد در نقاط مختلف اقیانوس های جهان کرد که مجموعه آنها را sosus می نامند . در تمام مت زمانی که عملیات نظامی نظیر اکتشاف انجام می شد آنها به صورت آهسته عمل کرده و به صورت کاملا مخفیانه یدک کشیده میشدند .
اغلب نمایشگر هایی که در سونارهای غیر فعال می بینیم دارای تصاویر دو بعدی هستند . محور افقی بیانگر فرکانس و محور عمودر بیانگر موقعیت رادار است .
سونار در جنگ :
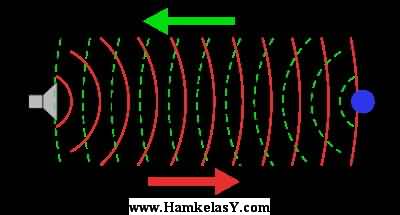
ناوگان ها یمدرن امروزی به طور گسترده از سونار استفاده می کننذ دو نوع سوناری که در مباحث قبلی مطرح شد ( سونار های فعال و غیر فعال ) به طور مکرر مورد استفاده قرار می گیرند . زمینه فعالیت های این رادار ها بسته به نوع موقعیت ناوها و زیردریایی ها تغییر می کند و بسته به نوع عملکرد نظامی در زمینه های مختلف باهم تفاوت می کنند . سونار های فعال زمانی که بتوانند موقعیت هدف را به خوبی تشخیص دهند بسیار مفید هستند . عملکرد سونارهای فعال مشابه رادار می باشد . پالس صوتی ارسال می شود سپس امواج صوتی در تمامی مسیرها شروع به حرکت می کنند . زمانی که این امواج به زمین برخورد میکنند امواج برخوردکننده در تمام جهات بازتابیده می شوند . و بعضی از سیگنال های بازتابیده شده به سنسور سونار فعال میرسند . این سیگنال های بازتابیده شده تکنیسین های سونار را قادر می سازد تا به شناسایی پارامتر هایی از قبیل فرکانس سیگنال انرژی سیگنال رسیده شده عمق درجه حرارت آب و درنتیجه موقعیت هدف بپردازند . اگرچه که استفاده از سونارهی فعال در عملیات نظامی بسیار خطرناک است زیرا به راحتی توسط ناوها و زیردریایی های دیگر قابل شناسایی است. برای اینکه نوع سونار ساتع کننده انرژی چیست کافی است تا به سیگنال صوتی ناشی از سونار گوش فرا دهیم (معمولا با استفاده از فرکانس سیگنال های رسیده شده به سنسور ) . در نتیجه با استفاده از انرژی دریافتی می توان موقعیت رادار را شناسایی کرد . سونارهای فعال قادر به شناسایی اهداف دریک فاصله معین می باشند اما مشکل این است که این رادار توسط شناساگرهای دیگر در فواصل چندین برابر فاصله شناسایی این سونارها قابل شناسایی هستند .
اهداف سونار رابطه کمی با محدوده ای که سونار در مرکز آن واقع شده است دارد . به طور نسبی بزرگی سیگنال دریافت شده از سونار ارسالی و نیز مسافت تا هدف وابسته است . و سیگنالها ی رسیده شده به سونار تنها مقدار کمی از اندازه سیگنال های ارسالی را به خود اختصاص می دهند . حتی اگر سیگنال دریافت شده توسط سونار دارای قدرتی مشابه باشند .
مثال زیر بیان کننده برخی از مشکلات به وجود آمده است :
فرض کنیم که سونار قابلیت ارسال سیگنالی با انرژی 20 وات و دریافت سیگنالی با حداقل انرژی 5 وات باشد . حال فرض نمایید که در فاصله 500 متری انرژی سونار به میزان 10 وات کاهش یابد . در صورتی که سیگنالی که بازتابیده میشود به طور کامل بازتابیده می شود با انرژی بیش تر از 5 وات به دریافت کننده سیگنال می رسند سیگنال اصلی دارای انرژی بالاتر از سیگنال با انرژی بیش از 5 وات در فاصله بین 500 تا 1000 متری است . اما دراین فاصله سیگنال بازگشتی به سونار دارای انرژی کمتر از 5 وات است و در نتیجه توسط سنسور قابل شناسایی نیست و در صورتی که از بویه صوتی استفاده کنیم پالس بازگشتی قابل شناسایی است . گیرنده آکوستیکی یا فرستنده آکوستیکی رادیویی نصب شده روی بویه که می تواند از هواپیما یا چتر پایین انداخته شود تا صداهای زیر آبی زیر دریا ها را دریافت و آنها را به هواپیما ارسال کند . برای ردیابی هدف تعداد زیادی بویه با الگوهایی که دارای مکان های معلوم یا مشکوک بوده به حضور هدف فرستاده می شود که هر بویه سیکنال قابل شناسایی خود را ارسال میکند .
در نتیجه جهت شناسایی سیگنال بازگشتی دو راه وجود دارد :
- سیگنال ارسالی بسیار پر قدرت باشد .
- شناساگرها بسیار حساس باشند تا بتوانند حداکثر فاصله رفت و برگشتی را که موج بازگشتی ارسال میکند تشخیص دهند.
زمانی که سونارهای فعال ایجاد نویز های شدید می کنند در نتیجه کسب اطلاعات توسط آنها ضعیف می باشد این نوع تشخیص توسط وسایلی که سکوها بروی آنها نصب می شوند نظیر هواپیما و هلی کوپترها انجام می گیرد وبه ندرت از زیر دریایها یا کشتی ها استفاده می گردد . زمانی که سونارهای فعال توسط کشتی ها یا زیر دریایی ها مورد استفاده قرار می گیرند این سونارها بوسیله تحریک های کوچک ادواری فعال می شوند( به وسیله پریود های متناوب و به وسیله تحریک های ضعیف ) جهت کاهش خطر شناسایی زیر دریایی توسط سونارهای غیر فعال دشمن در اغلب موارد سونار فعال به صورت پشتیبانی برای سونارهای غیر فعال در نظر گرفته می شود . زمانی که از هواپیما استفاده می شود سونارهای فعال درقالب بویه های یک بار مصرف استفاده می شوند که در هواپیماهای گشت زنی یدک کشیده می شوند یا در مجاورت یا نزدیکی محدوده ای که با سونارهای دشمن در ارتباط هستند انداخته می شوند بطور کلی سونارهای غیر فعال دارای محدوده و بست عملکرد گسترده تر نسبت به سونارهای فعال جهت شناسایی و کسب اطلاعات مورد نظر از هدف هستند .
زمانی که هر یک از وسایل موتور ریزه شده تولید بعضی تحریکات می کنند ممکن است سونار مورد نظر شناسایی شود . جهت بهبود وضعیت شناسایی سونارهای غیر فعال این سونارها دارای چشمی هستند چشمی مرکزی دارای دید 270 درجه است و دو چشمی دیگر که در دو سمت سونار تعبیه می شود هر کدام دارای دید 160 ردجه می باشد در نتیجه سونار دارای دید 360 درجه نسبت به محیط اطراف خودمی گردد. دراینجابا دو مسئله مواجه می شویم نخست نویزهای که زیر دریایی تولید می کند دیگر سیگنالهای دریافتی رسیده به سونار هنگامی که یک سیگنال در یک جهت مشخص شناسایی می شود و توسط سونار تعیین می گردد ( بدین معنا که هر سونار دارای ناحیه دیدی است که قادر به شناسایی سیگنالهای دریافتی است که به آن پهنای باند موقعیت گفته می شود ) این سیگنال توسط سونار آنالیز می شود ( آنالیز با استفاده از پهنای باند باریک ) که به طور کلی از تبدیل فوریه برای مشخص کردن سیگنال و آنالیز آن استفاده می شود سیگنال اصلی دارای فرکانسی است وهر کدام از موتورها نویزهای با فرکانس مشخص تولید می کنند در نتیجه با استفاده از یک فیلتر فرکانس گزین به راحتی سیگنال اصلی از داخل سیگنال همراه با نویز تشخیص داده می شود .
یکی دیگر از کاربردهای سونارهای غیر فعال در مسیریابی اهداف می باشد . این فرایند با نام آنالیز حرکت هدف( Target motion Analysis) شناخته می شود و قادربه مشخص کردن محدوده حرکت هدف جهت راستا و سرعت هدف می باشد . TMA طی فرایند خاصی وبا استفاده از دریافت سیگنالهای با جهت های مشخص از زمانهای متفاوت انجام می گیرد وهر سیگنال بیانگر مکانی است که هدف در آنجا قرار می گیرد با مقایسه این مکانها توسط اپراتور می توان نحوه حرکت را مشخص کرد . هنگامی که آنالیز حرکت نسبی هدف انجام می گیردبه یک مدل هندسی که با تعیین شرایط محدود انجام می پذیرد دست می یابیم .
یکی دیگر از کاربردهای سونارغیر فعال انجام عملیاتهای جاسوسی می باشد. در اینجا وجود تکنولوژی بالا از جمله فیلترهای فرکانس گزین و نیز دریافت کننده های حساس ضروری است . در نتیجه هزینه سیستمها سنگین می شود بطور کلی این آرایش در کشتیهای گران قیمت جهت بهبود وضعیت تشخیص ( شناسایی آنها ) استفاده می شود . زیردریایی های مجهز به سونارهای غیر فعال دارای این قابلیت هستند که در زیر لایه های حرارتی آب مخفی شده یا اینکه با پائین رفتن در جهت عمق دریا می توانند سرعت خود را بهبود بخشند. البته متعاقبا نویزهای تولید شده نیز افزایش می یابد.
§ فیشرایزهای اکوستیکی (Fisheries Acoustics)
این فیشرایزها در سونارها جهت شناسایی توده های ماهی انجام می پذیرد یک پالس درون آب ارسال شده وبا برخورد به اشیاء مورد هدف سونار که دارای چگالی متفاوتی نسبت به محیط اطراف خود هستند فرستاده می شوند مانند ماهی که صوتی را نسبت به منبع صوت پاسخ می دهد در واقع یک عکس العمل اکوستیکی از خود بروز می دهد این پژواک حاوی اطلاعاتی از قبیل اندازه ماهیها و موقعیت و فراوانی میزان ماهی ها می باشد . سخت افزارهای که برای اکوسوندر( echosounde) مورد نیاز است جهت فعالیتهای از قبیل فرستادن صدا، دریافت ، فیلترینگ ، آنالیز کردن پژواک مورد استفاده قرار می گیرد .
§ کاربرد فیشرایزهای اکوستیکی ( Fisheries Applications)
ماهی گیری یکی ازصنایع مهم است که با تقاضای زیادی روبرو شده است اما میزان صید جهانی به علت عدم دسترسی به منابع و نیز محدودیت منابع مشکل شده است در نتیجه تقاضای ناوگانهای ماهی گیری جهت بکارگیری روشهای مصنوعی جهت شکار با استفاده از وسایل الکترونیکی نظیر سنسورها ، مولد صدا و سونارها افزایش یافته است . ماهی گیرها در طول تاریخ روشهای متعدد و گوناگونی جهت بهره برداری کردن وصید ماهی ها استفاده کرده اند. بنابراین وجود تکنولوژی های اکستیکی یکی از روشهای بسیار موثر در ماهی گیری تجاری است .
عبور امواج صوتی ( انتشار امواج صوتی به علت تفاوت چگالی بین ماهی و آب متفاوت است این تفاوت به ما اجازه شناسایی توده های ماهی را می دهد تکنولوژی اکوستیک در زیر دریا کابرد فراوان دارد زیرا امواج صوتی در آب به مراتب مسافت بیشتری را می پیماید . امروزه کشتیها و ناوهای ماهی گیری فعالیت صیدی خود را به طور کامل بروی تکنولوژی اکوستیک ، سونارها و مولد های صدا متمرکز کرده اند. امروزه از سونارهای فعال جهت تعیین عمق آب و شناسایی وضعیت کف دریا استفاده می گردد.
واژه نامه :
Acostic sounding : عمق سنجی آکوستیکی
استفاده از امواج صوتی برای تعیین سطح عمق آب ، از طریق ندازه گیری زمان لازم برای رفت و برگشت پالس صوتی .
Acoustic acoustic : بازتابش آکوستیکی .
Thermocline : دماشیب .
واسطی میان آب سردتر و گرم تر اقیانوس ، که امواج سونار درآنها طوری خم میشوند که زیردزیایی ها می توانند با پنهان شدن زیر این واسط از آشکارشدن بگریزند .
Sonobouy , radio sonobouy : بویه صوتی ، بویه صوتی رادیویی .
Chirp : چهچهه
- تغییر نامطلوب در بسامد حامل موج پیوسته در هنگام کلیدزنی آن .
- صدای شنیده شده در گیرنده رمز هنگامی که بسامد حامل فرستنده به صورت خطی در مدت زمان پالس رمز افزایش میابد .
گیرنده آکوستیکی و فرستنده رادیویی نصب شده روی بویه ، می توانند از هواپیما یا چتر پایین انداخته شوند تا صدا های زیر آب زیر دریایی ها رادریافت و آنها را به هواپیما ارسال کنند . برای ردیابی زیردریایی ها تعداد زیاده با الگوهایی که دارای مکان های معلوم یا مشکوک به حضور زیردریایی انداخته می شود که هر بویه سیگنال قابل شناسلیی خود را ارسال می کند . سپس کامپیوتر هواپیما مکان زیردریایی را با مقایسه سیگنال های دریافت شده و تاخیر زمانی حاصل زا آن تعیین می کند .
- نویسنده : صالح لشگری
- منبع : همکلاسی
کاربر سایت
پرش به : ناوبری ، جستجو
این مقاله در مورد زیر آب صدای پخش شده. جوی اکتشاف تغییرات جوی ، به SODAR. برای دیگر کاربردها سونار (ابهامزدایی).
مطالب
[مخفی کردن]
* 1 تاریخچه
o 1.1 ASDIC
o 1.2 سونار
* 2 عملکرد عوامل
o 2.1 پخش صدا
o 2.2 ولوله
o 2.3 مشخصات مقصد
o 2.4 مقابله
* 3 سونار فعال
o 3.1 پروژه آرتمیس
o 3.2 کانال
o 3.3 عملکرد پیش بینی
o 3.4 پستانداران دریایی
o - 3.5 دست سونار برای استفاده توسط غواص برگزار شد
* 4 منفعل سونار
o 4.1 شناسایی منبع صدا
o 4.2 محدودیت ها سر و صدا
o 4.3 عملکرد پیش بینی
* 5 جنگ
o 5.1 جنگ ضد زیردریایی
o 5.2 Torpedoes
o 5.3 معادن
o 5.4 مقابله معدن
o 5.5 ناوبری زیردریایی
o 5.6 هواپیما
o 5.7 ارتباطات زیر آب
o 5.8 اقیانوس نظارت
o 5.9 زیر آب امنیت
o 5.10 دستی سونار
o 5.11 حائل سونار
* 6 غیرنظامی برنامه های کاربردی
o 6.1 شیلات
o 6.2 پژواک صدایی
o 6.3 مکان خالص
o 6.4 اندازه گیری سرعت کشتی
o 6.5 ROV و UUV
o 6.6 مکان خودرو
7 * برنامه های علمی
o 7.1 برآورد زیست توده
o 7.2 اندازه گیری موج
o 7.3 آب اندازه گیری سرعت
o 7.4 پایین ارزیابی نوع
o 7.5 پایین اندازه گیری توپوگرافی
o 7.6 زیر پروفایل پایین
o 7.7 سونار دیافراگم مصنوعی
o 7.8 پارامتری سونار
* 8 همچنین ببینید
* یادداشت 9
* 10 کتابشناسی
* 11 پیوند به بیرون
* 12 پیوند به بیرون
ناوچه F70 نوع فرانسوی (در اینجا ، لا Motte - Picquet) با VDS (متغیر عمق سونار) نوع DUBV43 یا DUBV43C نصب هستند towed sonars
سونار (در اصل مخفف ناوبری برای صدا و گرفته) است که در روش انتشار صدا استفاده می کند (معمولا زیر آب ، همانطور که در ناوبری زیردریایی) به حرکت ، و ارتباط با تشخیص و یا عروق دیگر. دو نوع سونار وجود دارد : فعال و منفعل دارد. سونار ممکن است به عنوان یک ابزار صوتی مکان و اندازه گیری مورد استفاده قرار گیرد از خصوصیات اکو از "اهداف" را در آب است. محل سکونت صوتی در هوا قبل از معرفی رادار مورد استفاده قرار گرفت. سونار نیز ممکن است در هوا باشد برای ناوبری ربات استفاده می شود ، و SODAR (به طور فزایندهای در سراغ سونار هوا) است برای بررسی جوی استفاده می شود. سونار اصطلاح همچنین برای استفاده از تجهیزات دریافت خواهید کرد و برای تولید صدا استفاده می شود. فرکانسهای مورد استفاده در سیستم های سونار از بسیار پایین (infrasonic) متفاوت باشد به extemely بالا (مافوق صوت). مطالعه صوت آکوستیک زیر آب ، به عنوان زیر آب و یا گاهی اوقات hydroacoustics شناخته شده است.
[ویرایش] تاریخچه
گرچه بعضی از حیوانات (دلفین و bats) با صدا برای برقراری ارتباط و تشخیص شی برای میلیونها سال ، استفاده از توسط انسان ها در آب استفاده می شود در ابتدا توسط لئوناردو داوینچی در سال 1490 را ضبط کرد : لوله به داخل آب وارد شده است گفته می شود مورد استفاده برای شناسایی عروق با قرار دادن گوش به لوله. [ویرایش]
در قرن 19th بل زیر آب به عنوان فرعی برای ارائه به lighthouses هشدار از خطرات مورد استفاده قرار گرفت.
استفاده از صدا را به 'کردهاید اکو' در زیر آب به همان شیوه به عنوان bats استفاده از صدا برای ناوبری هوایی به نظر می رسد توسط یدلایمخیرات 1912 از فاجعه تایتانیک را وادار شده است. اولین ثبت اختراع در جهان برای اکو زیر آب گرفته تا دستگاه در اداره ثبت اختراعات انگلستان توسط هوا شناس انگلیسی لوئیس ریچاردسون یک ماه پس از غرق کشتی تایتانیک از واصل شد ، و فیزیکدان آلمانی الکساندر Behm اوقات شرعی امروز به دست آمده برای انعکاس سنج صدا را در سال 1913. Reginald Fessenden کانادا ، در حالی که کار برای زیردریایی سیگنال شرکت در بوستون ، ساخته شده است یک سیستم آزمایشی ابتدا در سال 1912 ، یک سیستم در مراحل بعدی آزمایش لنگرگاه بوستون ، و در نهایت در سال 1914 از ایالات متحده درآمد (در حال حاضر گارد ساحلی) برش میامی در بانکهای بزرگ کردن نیوفاندلند کانادا می باشد. در این آزمون ، نشان داد Fessenden عمق اکتشاف تغییرات جوی ، ارتباطات زیر آب (مورس کد) و اکو در محدوده (تشخیص توده یخ شناور در دو مایل (3 کیلومتر) محدوده) [1] به اصطلاح نوسان ساز Fessenden ، در ça. 500 هرتز ، قادر به تعیین بلبرینگ از کوه یخ با توجه به 3 متر و با طول موج ابعاد کوچک صورت پرتوی مبدل 's(کمتر از 1 متر در قطر). مونترال ده زیردریایی ساخته شده است ارتفاع بریتانیا کلاس در سال 1915 با راه اندازی نوسان ساز Fessenden مجهز شدند. [2]
در جنگ جهانی اول نیاز به شناسایی زیردریایی وادار پژوهش های بیشتری را به استفاده از صدا. انگلیس ساخته شده در اوایل استفاده از hydrophones زیر آب ، در حالی که فیزیکدان فرانسوی پل Langevin ، کار با مهاجر مهندس برق روسی ، کنستانتین Chilowski ، در توسعه دستگاه های فعال صدا برای تشخیص زیردریایی ها را در سال 1915 با استفاده از کوارتز کار کرده است. اگرچه فیزوالکتریک و magnetostrictive transducers بعد جایگزین transducers الکترواستاتیک آنها استفاده می شود ، این کار تحت تاثیر طرح های آینده است. بسیار سبک وزن و کوچک و بزرگ حساس صدا و فیلم پلاستیکی که فیبر نوری برای hydrophones استفاده شده است (acousto - transducers برق برای استفاده در آب) ، در حالی که Terfenol - توسعه و PMN (niobate منیزیم سرب) برای پروژکتور های تدوین شده است.
[ویرایش] ASDIC
در سال 1916 ، تحت بنگاه بریتانیا اختراع و پژوهش ، کانادا ویلیام رابرت بویل فیزیکدان بر روی این پروژه فعال تشخیص صدا را با آب چوب گرفت ، تولید نمونه اولیه برای آزمایش در سال 1917 در اواسط. این کار ، برای ضد زیردریایی بخش ، محرمانه بودن در حد اعلی انجام شد ، و استفاده از کریستالهای کوارتز فیزوالکتریک به تولید اولین در جهان عملی زیر آب فعال دستگاه تشخیص صدا. برای حفظ محرمانه بودن هیچ اشاره ای به آزمایش صدا یا کوارتز ساخته شده بود - واژه برای توصیف اقدامات اولیه و فراصوت شناسی ( '') را به 'ASD'ics تغییر یافته بود ، کوارتز و مواد ASD'ivite به' : از این رو بریتانیا مخفف ASDIC. در سال 1939 ، در پاسخ به پرسش از فرهنگ انگلیسی آکسفورد ، Admiralty ساخته است که داستان آن را برای 'ایستاده متفقین زیردریایی تشخیص کمیته تحقیق' ، و این هنوز به طور گسترده معتقد بودند ، اگر چه بدون کمیته بلبرینگ این نام تا به در یافت می شود. آرشیو Admiralty] [3]
با 1918 ، هم ایالات متحده و انگلستان سیستم های فعال ساخته بود ، هرچند که به خوبی انگلیسی را پیش از ایالات متحده شدند. آنها ASDIC خود را در HMS Antrim در سال 1920 آزمایش شد و تولید محصولات در سال 1922 آغاز شده است. 6th ناوگان کوچک ویرانگر به حال ASDIC - عروق در سال 1923 مجهز خواهد کرد. مدرسه ضد زیر دریایی ، عقاب دریایی HMS ، و یک ناوگان کوچک آموزش از چهار رگ در پورتلند در سال 1924 تاسیس شد. ایالات متحده سونار QB وارد مجموعه در سال 1931.
با وقوع جنگ جهانی دوم ، نیروی دریایی سلطنتی به حال پنج مجموعه برای سطح کلاس های کشتی های مختلف ، و دیگران را برای زیردریایی ها ، به ادغام کامل سیستم ضد حمله به زیر دریایی. اثر اولیه ASDIC با استفاده از اتهام عمق به عنوان سلاح ضد زیر دریایی hamstrung شد. این حمله به کشتی مورد نیاز به بیش از تماس با submerged پاس قبل از انداختن بیش از اتهامات عنوان شده علیه اشترن ، که منجر به از دست دادن تماس با ASDIC در لحظه های که منجر به حمله کرد. اسب یا سگ شکاری به طور موثر شلیک کور بود ، که در طی آن زمان فرمانده زیردریایی می تواند اقدام گریزان شود. این وضعیت با استفاده از کشتی ها و با همکاری چندین تصویب "در آستانه پرتاب سلاح" ، مانند خارپشت و بعد از آن ماهی مرکب ، که کلاهک در هدف جلوتر از مهاجم بینی و در نتیجه هنوز در تماس با ASDIC remedied شد. تحولات در طول جنگ منجر به بریتانیا ASDIC دستگاه استفاده می شود که اشکال مختلفی از پرتو ، به طور مداوم پوشش نقاط کور. بعدها ، آکوستیک torpedoes مورد استفاده قرار گرفت.
در آغاز جنگ جهانی دوم ، بریتانیا تکنولوژی ASDIC به صورت رایگان به ایالات متحده منتقل خواهد شد. پژوهش در صدا و ASDIC زیر آب در بریتانیا گسترش یافت و در ایالات متحده است. بسیاری از انواع جدید نظامی تشخیص صدا توسعه یافته بودند. این sonobuoys شامل ، برای اولین بار توسط بریتانیا در سال 1944 تحت مشخصه و کد بالا چای توسعه یافته ، dipping / dunking سونار سونار و معدن تشخیص. این کار را تشکیل دادند تحولات پایه ای برای جنگ تنها مربوط به مقابله با زیر دریایی هسته ای است. کار در سونار به حال شده است نیز باشد که در کشورهای متحدین به اجرا درآمد ، به ویژه در آلمان ، که شامل اقدامات متقابل. در پایان جنگ جهانی دوم ، این کار آلمان جذب شده توسط بریتانیا و ایالات متحده بود. Sonars را ادامه داد به توسط بسیاری از کشورها ، از جمله روسیه ایجاد شود ، برای استفاده از هر دو نظامی و مدنی است. در سال های اخیر پیشرفت عمده ای نظامی بوده است علاقه به افزایش فرکانس در سیستم های پایین فعال است.
[ویرایش] سونار
در جنگ جهانی دوم ، آمریکایی ها برای سیستم های سونار مدت خود را ، به عنوان ابداع معادل رادار استفاده می شود. رادار بسیار فریبنده و موثر در نظر گرفته شد ، و آنها می خواستند را به پول نقد در در تاریخ به نام. [ویرایش] از سیگنال های استاندارد برای تمام کشور عضو ناتو ، منجر به از قطره ASDIC به نفع soñar. [ویرایش]
[ویرایش] عوامل کارایی
شناسایی ، طبقه بندی و محلی سازی از عملکرد سونار وابسته به محیط زیست و تجهیزات دریافت ، و نیز تجهیزات انتقال در سونار فعال و یا هدف سر و صدا در تابش سونار منفعل دارد.
[ویرایش] انتشار صدا
عملیات سونار توسط تغییرات در سرعت صدا تحت تاثیر قرار است ، به خصوص در هواپیما در حالت عمودی. صدا در ادامه سفر به آرامی در آب شیرین نسبت به آب دریا ، هر چند تفاوت کوچک است. سرعت توسط مدول فله آب و چگالی تعیین می شود. مدول توده ای تحت تاثیر قرار است توسط دما ، ناخالصی های محلول (معمولا شوری آب) و فشار دارد. اثر تراکم می باشد کوچک است. سرعت صوت (بر حسب فوت در ثانیه) حدود :
4388 (11.25 در درجه حرارت (در درجة فارنهایت)) (0.0182 × عمق (بر حسب فوت)) شوری (در نقاط در هر هزار).
مشتق از لحاظ تجربی این است معادله تقریبی برای قبولی درجه حرارت طبیعی ، غلظت شوری و طیف وسیعی از دقیق ترین عمق اقیانوس. درجه حرارت اقیانوس با عمق متفاوت است ، اما در میان 30 و 100 متر می باشد ، اغلب ، یک تغییر مشخص شده ، به نام thermocline ، تقسیم سطح آب گرمتر از سرما ، هنوز هم آب را تشکیل می دهند که بقیه از اقیانوس. این سونار می توانند ، نا امید چون منشاء صدا در یک طرف thermocline به سمت خم شود ، و یا از طریق thermocline refracted. thermocline ممکن است در آبهای ساحلی shallower حضور داشته باشد. با این حال ، عمل خواهد کرد ، اغلب موج در ستون آب و مخلوط را حذف thermocline. فشار آب نیز تاثیر می گذارد انتشار صدا : بالاتر فشار را افزایش می دهد سرعت صوت ، که سبب می شود که امواج صوتی را به بر گرداندن به دور از منطقه بالاتر از سرعت صوت باشد. مدل ریاضی است به نام قانون انکسار اسنل.
اگر منبع صدا است عمیق و شرایطی حق انتشار ممکن است در 'عمیق و کانال صدا' رخ می دهد. این باعث از دست دادن بسیار کم تکثیر به یک گیرنده را در کانال. دلیل این است که از صدا تجملات و تزئینات در کانال را با هیچ تلفات در مرزهای. تکثیر مشابه می تواند در 'سطح اتفاق می افتد مجرای' تحت شرایط مناسب است. با این حال در این مورد به زیان انعکاس در سطح وجود دارد.
تبلیغ در آب کم عمق است به طور کلی توسط انعکاس های مکرر در سطح و پایین ، جایی که زیان قابل توجهی رخ می دهد.
پخش صدا نیز جذب خود را در آب و نیز در سطح پایین و متاثر می شود. این جذب فرکانس ، وابسته به مکانیزم های مختلف با در آب دریا واقع شده است. بنابراین sonars مورد نیاز به بیش از محدوده های طولانی عمل تمایل به utilise فرکانس های پایین به حداقل رساندن اثرات جذب.
دریا شامل منابع بسیاری از سر و صدا که مانع از اکو و یا مقصد مورد نظر امضا. منابع نویز اصلی عبارتند از امواج و حمل و نقل. حرکت گیرنده را از طریق آب نیز می تواند نویز فرکانس پایین است که وابسته به سرعت ایجاد کند.
[ویرایش] ولوله
هنگامی که سونار فعال استفاده شده است ، پراش رخ می دهد از اجسام کوچک در دریا و نیز از پایین و سطح. این می تواند یک منبع اصلی از دخالت کند ، اما با سونار غیر فعال اتفاق نمی افتند. این اثر پراکندگی را از آن متفاوت است و در طنین اتاق است که این پدیده انعکاس. قیاس برای طنین پراکندگی از چراغهای جلو اتومبیل در مه یا غبار می باشد. بالا پرتو شدت مداد را در مه ؛ چراغهای جلو نفوذ عمده هستند ، کمتر به راهنمایی و هدایت و نتیجه را در "سفید کردن" که در آن ولوله برگردانده غالب. به طور مشابه ، برای غلبه بر ولوله ، سونار فعال نیاز دارد تا در پرتو باریک را منتقل کنند.
[ویرایش] خصوصیات مقصد
هدف از سونار ، مانند زیر دریایی ، دارای دو مشخصه اصلی است که تاثیر عملکرد سونار. برای سونار فعال است خصوصیات انعکاس آن صدا ، قدرت به عنوان هدف شناخته شده است. برای غیر فعال سونار هدف 'sتابش صفات سر و صدا هستند حیاتی است. طیف تابش را به طور کلی از زنجیره حل نشده از سر و صدا با خطوط طیفی در آن شامل خطوط برای طبقه بندی استفاده می شود.
اکوها هم از اشیاء دیگر در دریا مانند نهنگ ، wakes ، مدارس از ماهی و سنگهای به دست آمده.
[ویرایش] اقدامات متقابل
فعال (شده) اقدامات متقابل می تواند با یک زیر دریایی مورد حمله قرار گرفت راه اندازی می شود به منظور بالا بردن سطح نویز و / یا ارائه یک هدف بزرگ نادرست است.
منفعل (یعنی غیر شده) اقدامات متقابل عبارتند از :
* نصب و استقرار دستگاه های مولد سر و صدا در دستگاه های جدا.
* صدای جذب کننده پوشش های در پوسته از زیردریایی ها ، به عنوان مثال anechoic کاشی.
[ویرایش] فعال سونار
کتاب - سوال new.svg
در این بخش ، هیچ منبع و مأخذی نام برده نشدهاست.
لطفا این مقاله را بهبود با گسترش آن به ویکیپدیا. مطالب بیمنبع احتمالا در آینده حذف خواهند شد. (ژانویه 2009)
اصل سونار فعال
سونار های فعال استفاده می کند فرستنده و گیرنده صدا. هنگامی که این دو در همان محل است monostatic عمل می شوند. هنگامی که فرستنده و گیرنده از هم جدا شده است bistatic بهره برداری است. وقتی که بیشتر فرستنده های (و یا بیشتر گیرنده های) مورد استفاده قرار می spatially دوباره از هم جدا ، آن عمل multistatic. بیشترین sonars هستند monostatically با آرایه همان غالبا برای انتقال و دریافت استفاده می شود استفاده می شود. کاربران فعال زمینه sonobuoy ممکن است عمل جراحی multistatically.
سونار های فعال را ایجاد پالس صوت ، اغلب پینگ "" ، و سپس برای گوش بازتاب (اکو) از پالس. این پالس از صدا الکترونیکی ایجاد شده است به طور کلی با استفاده از پروژکتور سونار شامل سیگنال ژنراتور ، آمپلی فایر قدرت و الکترو آکوستیک مبدل / آرایه. beamformer معمولا کار به تمرکز قدرت شنوایی را به پرتو ، که ممکن است کج شده به زاویه پوشش مورد نیاز جستجو کنید. به طور کلی ، الکترو آکوستیک transducers از نوع Tonpilz هستند و طراحی آنها ممکن است بهینه شده برای رسیدن به حداکثر بهره وری بیش از وسیع ترین پهنای باند بالا ، به منظور بهینه سازی عملکرد سیستم کلی. گاه به گاه ، تپش آکوستیک ممکن است با هر نوع وسائل دیگر ایجاد می شود ، به عنوان مثال (1) از نظر شیمیایی با استفاده از مواد منفجره ، یا (2) airguns یا (3) پلاسما به منابع صوتی.
برای اندازه گیری فاصله تا جسم ، از زمان انتقال پالس به پذیرش شده است اندازه گیری شده و به محدوده توسط دانستن سرعت صوت تبدیل شد. برای اندازه گیری چرخ دنده ، hydrophones چند استفاده می شود و مجموعه اقدامات آن زمان از ورود نسبت به هر یک ، یا با آرایه ای از hydrophones ، با اندازه گیری نسبی در پرتوهای دامنه را از طریق یک فرایند شکل گرفته به نام beamforming. استفاده از یک آرایه را کاهش می دهد پاسخ به فضایی که برای ارائه سیستم های multibeam پوشش گسترده ای استفاده می شود. سیگنال مقصد (در صورت وجود) همراه با سر و صدا می باشد و سپس از طریق فرم های مختلف پردازش سیگنال ها ، که برای تصویب sonars ساده ممکن است درست اندازه گیری مصرف انرژی است. است و سپس به نوعی از دستگاه تصمیم گیری است که تماس های خروجی یا سیگنال مورد نیاز و یا سر و صدا ارائه شده. این دستگاه تصمیم گیری ممکن است اپراتور با هدفون و یا نمایش داده شود ، و یا در sonars پیچیدهتر این تابع ممکن است توسط نرم افزار انجام می شود. فرآیندهای تکمیلی ممکن است اجرا می شود به طبقه بندی هدف و ترجمه و بومی سازی آن و همچنین اندازه گیری سرعت آن است.
نبض ممکن است در فرکانس ثابت یا جیر جیر کردن از تغییر فرکانس می شود (به فشرده سازی اجازه می دهد نبض در پذیرش). ساده sonars سابق به طور کلی با استفاده از یک فیلتر گسترده ای به اندازه کافی برای پوشش تغییرات داپلر ممکن است به دلیل هدف جنبش ، در حالی که بیشتر آنهایی مجتمع به طور کلی عبارتند از : روش دوم. امروز ، فشرده سازی نبض معمولا به دست با استفاده از تکنیک های ارتباط دیجیتالی است. sonars نظامی اغلب پرتوهای متعدد برای ارائه پوشش همه جانبه در حالی که ساده است فقط آنهایی را پوشش قوس باریک. در اصل دوم ، اغلب در اطراف مکانیکی اسکن شده بود اما این روند کند شد.
بویژه در هنگام انتقال تک فرکانس استفاده می شود ، اثر دوپلر ممکن است مورد استفاده برای اندازه گیری سرعت شعاعی از هدف. تفاوت در فرکانس بین انتقال و دریافت سیگنال اندازه گیری شده است و تبدیل به سرعت. از آنجا که شیفت داپلر گیرنده می تواند با هر حرکت و یا هدف ، کمک هزینه مطرح می شود تا به سرعت شعاعی از پلت فرم جستجو ساخته شده باشد.
یکی از مفید سونار کوچک می رسد که تقریبا مانند یک چراغ قوه های ضد آب. یکی از نقطه سر به آب ، فشار یک دکمه ، و بار خوانده شده از راه دور. یکی دیگر از متغیرهای fishfinder "" را نشان می دهد که صفحه نمایش کوچک با shoals از ماهی است. بعضی از sonars غیر نظامی رویکرد نظامی در sonars فعال ، توانایی ها ، با سه کاملا عجیب و غریب و صفحه نمایش بعدی از این منطقه در نزدیکی قایق. با این حال ، این sonars هستند برای خفا نمی طراحی شده است.
هنگامی که سونار فعال است مورد استفاده برای اندازه گیری فاصله مبدل به انتهای صفحه ، آن را به عنوان پژواک صدایی شناخته شده است. روش های مشابه ممکن است مورد استفاده قرار گیرد نظر به طور فزایندهای برای اندازه گیری موج.
سونار های فعال نیز استفاده می شود اندازه گیری از راه دور را از طریق آب بین transducers سونار دو یا ترکیبی از hydrophone (میکروفون آکوستیک زیر آب) و پروژکتور (زیر آب بلندگو و آکوستیک). مبدل یک وسیله است که می تواند ارسال و دریافت سیگنال های صوتی ( "وبنوشت") است. هنگامی که یک hydrophone / مبدل دریافت سیگنال خاص آن را توسط بازجویی انتقال سیگنال پاسخ خاص حرکت میکند. برای اندازه گیری فاصله ، یک مبدل / پروژکتور انتقال سیگنال بازجویی و اقدامات زمان بین این انتقال و دریافت از مبدل های دیگر / پاسخ hydrophone. اختلاف زمان ، مدرج شده توسط سرعت صوت را از طریق آب و تقسیم بر دو ، فاصله بین دو سیستم عامل می باشد. در این روش ، زمانی که با چندین transducers / hydrophones / پروژکتور ، استفاده می شود می تواند موقعیت های نسبی محاسبه ثابت و حرکت دادن اشیاء در آب.
در زمان جنگ ، از انتشار پالس فعال شده است پس به خاطر نهان زیر دریایی است که آن را در نظر گرفته شده است بسیار شدید از نقض تاکتیک سازش.
بسیار جامع ، هنوز کم نوع بهره وری از سونار (استفاده شده توسط شیلات ، نظامی ، و برای امنیت پورت) استفاده می کند از یکی از ویژگی های غیر خطی پیچیده ای از آب معروف به سونار غیر خطی ، مجازی مبدل می شود به عنوان یک آرایه پارامتری شناخته شده است.
[ویرایش] پروژه آرتمیس
پروژه آرتمیس یکی از نوع کم فرکانس سونار برای نظارت که خارج از برمودا برای چندین سال در اوایل 1960s مستقر شده بود. بخش فعال از جنگ جهانی دوم تانک مستقر بود ، و آرایه دریافت خواهید کرد ساخته شده بود و در یک موقعیت ثابت در بانک دریایی.
[ویرایش] کانال
این دستگاه سونار فعال دارد که دریافت محرک و بلافاصله است (و یا با تاخیر) retransmits سیگنال دریافت کرده و یا یکی از پیش تعیین شده.
[ویرایش] پیش بینی عملکرد
هدف سونار کوچک است نسبت به حوزه ، در اطراف محور با ساتع کننده ، که در آن واقع شده است. بنابراین ، قدرت سیگنال منعکس شده است بسیار کم ، احکام چند تن از قدر کمتر از سیگنال اصلی. حتی اگر سیگنال منعکس شده بود از همان قدرت ، مثال زیر را (با استفاده از مقادیر فرضی) را نشان می دهد مشکل : فرض کنید یک سیستم از سونار ساطع قادر است عرض 10،000 / m² سیگنال در 1 متر و عرض 0.001 تشخیص / m² سیگنال. 100 متر در سیگنال خواهد شد عرض 1 / m² (با توجه به قانون معکوس مربع). اگر سیگنال از کل 10 متر مربع هدف منعکس می شود ، آن را در عرض 0.001 باشد / m² زمانی که آن را با ساتع کننده می رسد ، یعنی فقط قابل ردیابی. با این حال ، سیگنال اصلی را در بالا عرض 0.001 باقی می ماند / متر مربع تا 300 متر هر 10 متر مربع هدف بین 100 و 300 متر با استفاده از سیستم شبیه و یا بهتر است قادر به تشخیص نبض را توسط اما ساتع کننده تشخیص داده نمی شود. آشکارسازهای باید بسیار حساس به وانت اکوها. از آنجایی که سیگنال اصلی است بسیار قوی است ، می توان آن را تشخیص داده هر چند بار دیگری به جز دو بار در گستره ای از سونار (مانند مثال).
سونار فعال در سال دو محدودیت عملکرد ، به علت سر و صدا و ولوله وجود دارد. در یکی از عمومی و یا دیگر از این خواهد کرد که تسلط بر دو اثر می تواند در ابتدا به طور جداگانه در نظر گرفته.
سر و صدا در شرایط محدود در تشخیص اولیه :
خوردها - 2TL TS - (NL - دی) = DT
خوردها است که در آن سطح منبع ، TL است از دست دادن انتقال (و یا از دست دادن تبلیغ) ، TS است قدرت هدف ، NL است سطح سر و صدا ، دی است شاخص directivity از آرایه (آرایه های تقریبی ، به دست آوردن) و DT است آستانه تشخیص.
در شرایط ولوله محدود در تشخیص اولیه (غفلت دست آوردن آرایه) :
خوردها - 2TL TS = RL DT
RL شده است که در آن سطح ولوله و عوامل دیگر مانند قبل.
[ویرایش] پستانداران دریایی
نهنگ گوژپشت
اطلاعات بیشتر : پستانداران دریایی و سونار
سونار های فعال ممکن است جانوران دریایی ، آسیب اگر چه مکانیسم های دقیق برای این به خوبی درک نمی شود. بعضی از جانوران دریایی همچون نهنگ ها و دلفین ها ، استفاده از سیستم های echolocation ، گاهی به نام biosonar کردهاید به شکارچیان و شکار. است و حدس زده است که فرستنده های سونار فعال می تواند این حیوانات و مغشوش کردن تداخل با تابع اصلی بیولوژیکی مانند تغذیه و جفت گیری.
[ویرایش] دستی سونار برای استفاده توسط غواص
غواص خوانده با استفاده از دست INSS - سونار برگزار شد
* LIMIS (= معدن صدف کوهی تصویربرداری سونار) دست نگه داشته شود یا ROV است سونار تصویربرداری برای استفاده توسط غواص سوار شده است. نام آن است ، زیرا برای گشت زنی در غواصان (frogmen مبارزه با صدور ویزای ورود و یا غواصان) طراحی شده است تا برای معادن صدف کوهی در آب دید کم کنیم. پیوندها :
o [1] خلاصه مقاله را با جامعه بین المللی برای مهندسی نوری [4]
o [2] برای پیدا کردن باقی مانده از حادثه فضاپیمای کلمبیا
o [3] مورد استفاده در تحقیق در ماهی تصویب تسهیلات قوه محرکه مولد برق
* Luís (= Lensing زیر آب تصویربرداری سیستم) دیگر سونار تصویربرداری برای استفاده توسط غواص است. پیوندها :
o [4] مورد استفاده برای شمارش ماهی قزل آلا در رودخانه
* است و یا وجود دارد چراغ قوه کوچک به شکل دستی سونار برای غواصان ، که صرفا محدوده نمایش داده شد.
* برای INSS = سونار سیستم یکپارچه ناوبری مراجعه کنید :
o با مزه.
o شرح کوتاه
توضیحات o
[ویرایش] سونار منفعل
سونار گوش فرا می منفعل و بدون انتقال. که اغلب در زمینه های نظامی به کار ، اگر چه آن را نیز در برنامه های علمی استفاده می شود ، به عنوان مثال تشخیص ماهی برای حضور / فقدان مطالعات در محیط های مختلف آبزیان - آکوستیک را نیز منفعل و رادار منفعل دارد. در وسیعترین استفاده بسیار ، این دوره می تواند عملا هیچ روش تحلیلی که شامل صدای تولید شده از راه دور ، در بر گرفتن هر چند که معمولا به تکنیک های اعمال شده در محیط زیست آبزیان محدود می باشد.
[ویرایش] شناسایی منابع صوتی
سونار منفعل کرده است طیف گسترده ای از روش های برای تشخیص منبع صدا تشخیص داده. به عنوان مثال ، عروق ایالات متحده عمل معمولا 60 هرتز متناوب سیستم های قدرت جاری است. اگر ترانسفورماتور و یا ژنراتور و بدون لرزش عایق مناسب از هال نصب شده است و یا تبدیل به آب گرفتگی ، 60 هرتز صدا از سیم پیچ می تواند از زیر دریایی یا کشتی صادر شده باشد. این کمک می تواند ملیت خود را به تشخیص ، مانند بیشتر زیردریایی اروپایی سیستم های 50 هرتز قدرت. متناوب منابع صوتی (مانند یک آچار که کاهش یافته است) نیز ممکن است قابل تشخیص می شود به سونار منفعل دارد. تا همین اواخر ، یک اپراتور با تجربه آموزش داده سیگنال های شناسایی است ، اما در حال حاضر این کامپیوترها ممکن است انجام دهد.
سیستم های سونار منفعل پایگاه داده های بزرگ ممکن است صوتی ، اپراتور داشته باشند ، ولی معمولا در نهایت سونار classifies سیگنال های دستی. سیستم کامپیوتری استفاده می کند که اغلب در این پایگاه داده برای شناسایی کلاس های کشتی ، اقدامات (به عنوان مثال سرعت یک کشتی و یا نوع سلاح منتشر شد) ، و حتی کشتی های خاص. نشریات و طبقه بندی شده توسط تلفن های موبایل و به طور مستمر توسط دفتر اطلاعات نیروی دریایی آمریکا به روز شده تامین می شود.
[ویرایش] محدودیت ها سر و صدا
سونار منفعل در وسایل نقلیه است که معمولا به شدت به دلیل سر و صدای تولید شده توسط وسایل نقلیه محدود شده است. به همین دلیل ، بسیاری از فعالیت راکتور زیردریایی های هسته ای است که می تواند بدون پمپ های سرد می شود ، انتقال گرما با استفاده از سکوت ، و یا سلول های سوختی یا باتری ، خاموش است که همچنین می تواند اجرا شود. propellers وسایل نقلیه 'نیز طراحی شده و دقیقا machined به خارج کردن نویز حداقل. بالا propellers سرعت اغلب حباب های کوچکی در آب ، ایجاد و این حفرهزایی صدای متمایز کرده است.
hydrophones سونار ممکن است در پشت کشتی یا زیر دریایی towed می شود به منظور کاهش اثر نویز تولید شده توسط خود watercraft. واحد Towed همچنین thermocline ، مبارزه را به عنوان واحد ممکن است در بالا یا زیر thermocline towed باشد.
نمایش sonars منفعل ترین مورد استفاده قرار باشد به دو صفحه نمایش آبشار بعدی. جهت افقی صفحه نمایش است بلبرینگ. فرکانس عمودی است ، و یا گاهی اوقات زمان. یکی دیگر از روش صفحه نمایش به رنگ کد فرکانس زمان برای بلبرینگ. بیشتر نمایش های اخیر توسط کامپیوتر تولید شده اند ، و تقلید کردن رادار نوع طرح و موقعیت را نمایش نشانگر.
[ویرایش] پیش بینی عملکرد
بر خلاف سونار فعال ، تنها یکی از راه های انتشار آن درگیر بود. با توجه به پردازش سیگنال های مختلف استفاده می شود ، حداقل سیگنال قابل تشخیص به نسبت سر و صدا متفاوت خواهد بود. معادله برای تعیین عملکرد سونار غیر فعال می باشد :
خوردها - TL = NL - دی DT
خوردها است که در آن سطح منبع ، TL است از دست دادن انتقال ، NL است سطح سر و صدا ، دی اول انجمن directivity از آرایه است (تقریبی به دست آوردن آرایه) و DT آستانه تشخیص است. رقم از شایستگی از سونار غیر فعال می باشد :
FOM = خوردها دی - (NL DT).
[ویرایش] جنگ
نیروی دریایی جنگ های مدرن استفاده می کند گسترده از سونار. دو نوع توصیف پیش از هر دو ، با استفاده از سیستم عامل های مختلف ، آب یعنی باربری کشتی ، هواپیما و تاسیسات ثابت. سودمندی سونار فعال در برابر منفعل بستگی به تابش صفات سر و صدا از هدف ، به طور کلی یک زیردریایی. گرچه در WW سونار دوم فعال بود و عمدتا ، توسط زیردریایی ها استفاده می شود به جز با ظهور سیگنال مدرن پردازش سونار غیر فعال بود برای تشخیص اولیه ترجیح داده میشود. همانطور که زیردریایی تبدیل شده اند ساکت تر ، عملیات فعال بوده و در حال حاضر بیشتر استفاده می شود. در سال 1987 ، یک بخش از این گزارش شرکت ژاپنی توشیبا به فروش ماشین آلات را به اتحاد جماهیر شوروی که اجازه استفاده از آسیاب تیغه پروانه زیر دریایی به طوری که آنها اساسا ساکت تر شد ، ایجاد یک مشکل بزرگ امنیتی با نسل جدیدتر خود را از زیر دریاییها.
سونار فعال می شود بی نهایت گاهی اوقات مفید است ، چون آن را می دهد فایل ¬ های دقیق به هدف (و گاهی اوقات محدوده). سونار فعال با این نسخهها کار به همان شیوه به عنوان رادار : سیگنال صادر شده است. موج صوتی و سپس در جهت بسیاری از سفر را از جسم ساطع. وقتی که بازدید یک شی ، موج صوتی است سپس در بسیاری از جهات دیگر منعکس می شود. برخی از انرژی برای مسافرت به منبع ساطع. اکو سیستم خواهد شد سونار یا تکنسین جهت محاسبه با به عوامل مختلفی از قبیل فرکانس فعال کردن ، انرژی سیگنال دریافت کرده اید ، عمق ، درجه حرارت آب و غیره ، موقعیت شی انعکاسی است. سونار های فعال استفاده می شود وقتی که فرمانده پلت فرم تعیین کننده آن است که اهمیت بیشتری برای تعیین موقعیت زیردریایی تهدید ممکن است از آن این است که موقعیت خود را پنهان کرد. با کشتی های سطحی ممکن است آن را به عهده گرفت که در حال حاضر تهدید ردیابی کشتی را با اطلاعات ماهواره ای. هر کشتی در اطراف سونار ساطع خواهد کرد انتشار تشخیص دهد. پس از شنیده سیگنال ها ، از آن آسان است برای شناسایی نوع سونار (معمولا با فرکانس آن) و موقعیت آن (انرژی با موج صوتی است). علاوه بر این ، سونار فعال ، مشابه به رادار ، به کاربر اجازه می دهد تا تشخیص اشیاء در محدوده خاصی ، بلکه قادر به تشخیص سیستم عامل های دیگر سونار فعال در گستره دور بیشتر است.
از سونار فعال نشانی از طبقه بندی دقیق اجازه نمی دهد و بسیار پر سر و صدا ، این نوع تشخیص توسط سیستم عامل سریع (هواپیما ، هلیکوپتر) و سیستم عامل های پر سر و صدا (اکثر کشتی های سطحی) اما بسیار به ندرت توسط زیردریایی ها استفاده می شود. سونار های فعال زمانی که توسط کشتی یا زیردریایی سطح مورد استفاده قرار میگیرد ، آن را معمولا به اختصار بسیار در دوره های متناوب فعال کرده ، و به منظور کاهش خطر ابتلا به تشخیص توسط سونار غیر فعال دشمن است. به این ترتیب ، سونار فعال بوده و به طور معمول یک نسخه پشتیبان تهیه سونار غیر فعال به شمار می رود. در هواپیما ، سونار فعال به صورت sonobuoys یکبار مصرف که در منطقه گشت زنی هوایی را کاهش یافته است و یا در مجاورت تماس با ما دشمن ممکن است سونار مورد استفاده قرار میگیرد.
سونار منفعل چندین مزیت است. مهمتر از همه ، آن خاموش. اگر هدف تابش است سر و صدا در سطح بالا به اندازه کافی ، می تواند گستره ای بزرگتر از سونار فعال را شناسایی و اجازه می دهد تا از هدف باشد. از آنجا که هر شی موتوری می کند برخی از سر و صدا ، ممکن است تشخیص داده می شود در نهایت. آن را به سادگی روی مقدار سر و صدا و گسیل مقدار نویز در منطقه بستگی دارد ، و همچنین تکنولوژی استفاده می شود. برای ساده ، سونار منفعل "می بیند" در اطراف کشتی با استفاده از آن. در یک زیردریایی ، دماغه سوار شده تشخیص سونار غیر فعال در جهت از حدود 270 ° ، در مرکز در هم ترازی کشتی ، هال - آرایه ای از حدود 160 درجه در هر طرف سوار شده ، و از آرایه towed کامل 360 °. دخالت خود زمینه های نامرئی به خاطر کشتی هستند. هنگامی که یک سیگنال در یک جهت خاص تشخیص داده شده است (که بدان معنی است که چیزی صدا می کند در آن مسیر ، این تشخیص پهنای باند نامیده می شود) ممکن است که به زوم در و تجزیه و تحلیل سیگنال را دریافت (آنالیز narrowband). معمولا این کار با استفاده از تبدیل فوریه برای نشان دادن فرکانسهای مختلف بطوریکه صدا. از آنجا که هر موتور باعث سر و صدای خاص ، آن است بی پرده برای شناسایی شی. پایگاه داده های طبقه بندی شده از نویزهای منحصر به فرد ، بخشی از آنچه به عنوان هوش آکوستیک یا ACINT شناخته شده است.
یکی دیگر از استفاده از سونار غیر فعال است برای تعیین خط سیر هدف است. این فرآیند گفته می شود مقصد تحلیل حرکت (تیامای) ، و در نتیجه "راه حل" محدوده مقصد است ، البته ، و سرعت است. تیامای توسط مارک از کدام جهت صدا می آید در زمانهای مختلف انجام داده است ، و در مقایسه با حرکت از کشتی است که خود اپراتور است. تغییر در حرکت نسبی اند تجزیه و تحلیل با استفاده از تکنیک های استاندارد هندسی همراه با برخی از فرضیات در مورد محدود کردن موارد.
سونار منفعل است یواشکی و بسیار مفید است. با این حال ، آن بالا نیاز به قطعات فنی (گروه موسیقی گذری فیلتر ، گیرندهها) و آن را پر هزینه است. بطور کلی در کشتی های گران قیمت به صورت آرایه مستقر به منظور ارتقاء تشخیص. کشتی های سطحی استفاده از آن به اثر خوب ؛ حتی بهتر از آن است مورد استفاده زیردریایی ها است ، و نیز با هواپیما و هلیکوپتر ، استفاده می شود که عمدتا به "اثر تعجب" ، از زیردریایی می تواند در زیر لایه های حرارتی مخفی نمایند. اگر فرمانده زیردریایی معتقد است او به تنهایی ، او ممکن است قایق خود را نزدیک تر به سطح آورد و به تشخیص راحت تر می شود ، و یا به عمیق تر و سریعتر ، بیشتر و در نتیجه ایجاد صدا.
نمونه هایی از کاربردهای سونار استفاده نظامی زیر داده شده است. بسیاری از از استفاده های مدنی داده شده در بخش های زیر ممکن است قابل اجرا باشد به استفاده از نیروی دریایی.
[ویرایش] جنگ ضد زیردریایی
سونار و عمق متغیر گردان آن
تا همین اواخر ، sonars کشتی معمولا با هال آرایه های سوار شده بودند ، یا به amidships یا در سجود. به زودی پس از استفاده های اولیه خود را پیدا نشد که به معنی کاهش سر و صدا بود جریان مورد نیاز است. اول بوم در چارچوب ساخته شده بودند ، پس آنهایی فولاد مورد استفاده قرار گرفت. در حال حاضر گنبدها معمولا تقویت شده ساخته شده از لاستیک های پلاستیکی و یا فشار. sonars چنین عمدتا فعال در بهره برداری است. نمونه ای از یک پوست معمولی سوار سونار SQS - 56 است.
از آنجا که از مشکلات از سر و صدای کشتی ، sonars towed نیز استفاده می شود. این نیز استفاده از توانایی باید عمیق تر در آب قرار داده است. با این وجود محدودیت در مورد استفاده از آنها در آب کم عمق وجود دارد. اینها به نام towed آرایه های (خطی) و یا متغیر sonars عمق (VDS) با آرایه های 2/3D. مشکل این است که winches مورد نیاز برای استقرار / بهبود این بزرگ و گران است. مجموعه VDS عمدتا فعال در عملیات در حالی که آرایه های towed منفعل هستند.
نمونه ای از یک کشتی مدرن فعال / غیر فعال towed سونار سونار یدلایمخیرات 2087 ساخته شده توسط سیستم تالس زیر آب است.
اصل مقاله
other uses, see Sonar (disambiguation). Contents
[hide]
- 1 History
- 2 Performance factors
- 3 Active sonar
- 4 Passive sonar
- 5 Warfare
- 6 Civilian applications
- 7 Scientific applications
- 8 See also
- 9 Notes
- 10 Bibliography
- 11 Further reading
- 12 External links

French F70 type frigates (here, La Motte-Picquet) are fitted with VDS (Variable Depth Sonar) type DUBV43 or DUBV43C towed sonars
Sonar (originally an acronym for sound navigation and ranging) is a technique that uses sound propagation (usually underwater, as in Submarine navigation) to navigate, communicate with or detect other vessels. There are two kinds of sonar: active and passive. Sonar may be used as a means of acoustic location and of measurement of the echo characteristics of "targets" in the water. Acoustic location in air was used before the introduction of radar. Sonar may also be used in air for robot navigation, and SODAR (an upward looking in-air sonar) is used for atmospheric investigations. The term sonar is also used for the equipment used to generate and receive the sound. The frequencies used in sonar systems vary from very low (infrasonic) to extemely high (ultrasonic). The study of underwater sound is known as underwater acoustics or sometimes hydroacoustics.
[edit] History
Although some animals (dolphins and bats) have used sound for communication and object detection for millions of years, use by humans in the water is initially recorded by Leonardo Da Vinci in 1490: a tube inserted into the water was said to be used to detect vessels by placing an ear to the tube.[citation needed]
In the 19th century an underwater bell was used as an ancillary to lighthouses to provide warning of hazards.
The use of sound to 'echo locate' underwater in the same way as bats use sound for aerial navigation seems to have been prompted by the Titanic disaster of 1912. The world's first patent for an underwater echo ranging device was filed at the British Patent Office by English meteorologist Lewis Richardson a month after the sinking of the Titanic, and a German physicist Alexander Behm obtained a patent for an echo sounder in 1913. Canadian Reginald Fessenden, while working for the Submarine Signal Company in Boston, built an experimental system beginning in 1912, a system later tested in Boston Harbor, and finally in 1914 from the U.S. Revenue (now Coast Guard) Cutter Miami on the Grand Banks off Newfoundland Canada. In that test, Fessenden demonstrated depth sounding, underwater communications (Morse Code) and echo ranging (detecting an iceberg at two miles (3 km) range).[1] The so-called Fessenden oscillator, at ca. 500 Hz frequency, was unable to determine the bearing of the berg due to the 3 meter wavelength and the small dimension of the transducer's radiating face (less than 1 meter in diameter). The ten Montreal-built British H class submarines launched in 1915 were equipped with a Fessenden oscillator.[2]
During World War I the need to detect submarines prompted more research into the use of sound. The British made early use of underwater hydrophones, while the French physicist Paul Langevin, working with a Russian immigrant electrical engineer, Constantin Chilowski, worked on the development of active sound devices for detecting submarines in 1915 using quartz. Although piezoelectric and magnetostrictive transducers later superseded the electrostatic transducers they used, this work influenced future designs. Lightweight sound-sensitive plastic film and fibre optics have been used for hydrophones (acousto-electric transducers for in-water use), while Terfenol-D and PMN (lead magnesium niobate) have been developed for projectors.
[edit] ASDIC
In 1916, under the British Board of Invention and Research, Canadian physicist Robert William Boyle took on the active sound detection project with A B Wood, producing a prototype for testing in mid 1917. This work, for the Anti-Submarine Division, was undertaken in utmost secrecy, and used quartz piezoelectric crystals to produce the world's first practical underwater active sound detection apparatus. To maintain secrecy no mention of sound experimentation or quartz was made - the word used to describe the early work ('supersonics') was changed to 'ASD'ics, and the quartz material to 'ASD'ivite: hence the British acronym ASDIC. In 1939, in response to a question from the Oxford English Dictionary, the Admiralty made up the story that it stood for 'Allied Submarine Detection Investigation Committee', and this is still widely believed, though no committee bearing this name has been found in the Admiralty archives.[3]
By 1918, both the US and Britain had built active systems, though the British were well in advance of the US. They tested their ASDIC on HMS Antrim in 1920, and started production in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school, HMS Osprey, and a training flotilla of four vessels were established on Portland in 1924. The US Sonar QB set arrived in 1931.
By the outbreak of World War II, the Royal Navy had five sets for different surface ship classes, and others for submarines, incorporated into a complete anti-submarine attack system. The effectiveness of early ASDIC was hamstrung by the use of the depth charge as an anti-submarine weapon. This required an attacking vessel to pass over a submerged contact before dropping charges over the stern, resulting in a loss of ASDIC contact in the moments leading up to attack. The hunter was effectively firing blind, during which time a submarine commander could take evasive action. This situation was remedied by using several ships cooperating and by the adoption of "ahead throwing weapons", such as Hedgehog and later Squid, which projected warheads at a target ahead of the attacker and thus still in ASDIC contact. Developments during the war resulted in British ASDIC sets which used several different shapes of beam, continuously covering blind spots. Later, acoustic torpedoes were used.
At the start of World War II, British ASDIC technology was transferred for free to the United States. Research on ASDIC and underwater sound was expanded in the UK and in the US. Many new types of military sound detection were developed. These included sonobuoys, first developed by the British in 1944 under the codename High Tea, dipping/dunking sonar and mine detection sonar. This work formed the basis for post war developments related to countering the nuclear submarine. Work on sonar had also been carried out in the Axis countries, notably in Germany, which included countermeasures. At the end of World War II this German work was assimilated by Britain and the US. Sonars have continued to be developed by many countries, including Russia, for both military and civil uses. In recent years the major military development has been the increasing interest in low frequency active systems.
[edit] SONAR
In World War II, the Americans used the term SONAR for their systems, coined as the equivalent of RADAR. RADAR was considered very glamorous and effective, and they wanted to cash in on the name.[citation needed] Standardisation of signals for all NATO countries led to the dropping of ASDIC in favor of SONAR.[citation needed]
[edit] Performance factors
The detection, classification and localisation performance of a sonar depends on the environment and the receiving equipment, as well as the transmitting equipment in an active sonar or the target radiated noise in a passive sonar.
[edit] Sound propagation
Sonar operation is affected by variations in sound speed, particularly in the vertical plane. Sound travels more slowly in fresh water than in sea water, though the difference is small. The speed is determined by the water's bulk modulus and mass density. The bulk modulus is affected by temperature, dissolved impurities (usually salinity), and pressure. The density effect is small. The speed of sound (in feet per second) is approximately:
4388 + (11.25 × temperature (in °F)) + (0.0182 × depth (in feet)) + salinity (in parts-per-thousand ). This empirically derived approximation equation is reasonably accurate for normal temperatures, concentrations of salinity and the range of most ocean depths. Ocean temperature varies with depth, but at between 30 and 100 meters there is often a marked change, called the thermocline, dividing the warmer surface water from the cold, still waters that make up the rest of the ocean. This can frustrate sonar, because a sound originating on one side of the thermocline tends to be bent, or refracted, through the thermocline. The thermocline may be present in shallower coastal waters. However, wave action will often mix the water column and eliminate the thermocline. Water pressure also affects sound propagation: higher pressure increases the sound speed, which causes the sound waves to refract away from the area of higher sound speed. The mathematical model of refraction is called Snell's law.
If the sound source is deep and the conditions are right, propagation may occur in the 'deep sound channel'. This provides extremely low propagation loss to a receiver in the channel. This is because of sound trapping in the channel with no losses at the boundaries. Similar propagation can occur in the 'surface duct' under suitable conditions. However in this case there are reflection losses at the surface.
In shallow water propagation is generally by repeated reflection at the surface and bottom, where considerable losses can occur.
Sound propagation is also affected by absorption in the water itself as well as at the surface and bottom. This absorption is frequency dependent, with several different mechanisms in sea water. Thus sonars required to operate over long ranges tend to utilise low frequencies to minimise absorption effects.
The sea contains many sources of noise that interfere with the desired target echo or signature. The main noise sources are waves and shipping. The motion of the receiver through the water can also cause low frequency noise, which is speed dependent.
[edit] Reverberation
When active sonar is used, scattering occurs from small objects in the sea as well as from the bottom and surface. This can be a major source of interference but does not occur with passive sonar. This scattering effect is different from that in room reverberation which is a reflection phenomenon. An analogy for reverberation is the scattering of a car's headlights in fog or mist. A high-intensity pencil beam will penetrate the fog; main headlights are less directional and result in "white-out" where the returned reverberation dominates. Similarly, to overcome reverberation, an active sonar needs to transmit in a narrow beam.
[edit] Target characteristics
The target of a sonar, such as a submarine, has two main characteristics that influence the performance of the sonar. For active sonar it is its sound reflection characteristics, known as its target strength. For passive sonar the target's radiated noise characteristics are critical. The radiated spectrum in general will consist of an unresolved continuum of noise with spectral lines in it, the lines being used for classification.
Echoes are also obtained from other objects in the sea such as whales, wakes, schools of fish and rocks.
[edit] Countermeasures
Active (powered) countermeasures may be launched by a submarine under attack to raise the noise level and/or provide a large false target.
Passive (i.e., non-powered) countermeasures include:
- Mounting noise-generating devices on isolating devices.
- Sound-absorbent coatings on the hulls of submarines, for example anechoic tiles.
[edit] Active sonar
This section does not cite any references or sources.
Please help improve this article by adding citations to reliable sources. Unsourced material may be challenged and removed. (January 2009)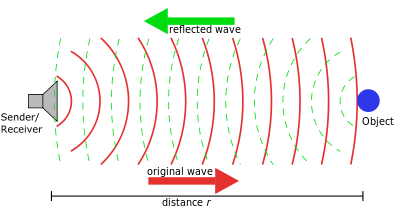
Principle of an active sonar
Active sonar uses a sound transmitter and a receiver. When the two are in the same place it is monostatic operation. When the transmitter and receiver are separated it is bistatic operation. When more transmitters (or more receivers) are used, again spatially separated, it is multistatic operation. Most sonars are used monostatically with the same array often being used for transmission and reception. Active sonobuoy fields may be operated multistatically.
Active sonar creates a pulse of sound, often called a "ping", and then listens for reflections (echo) of the pulse. This pulse of sound is generally created electronically using a Sonar Projector consisting of a signal generator, power amplifier and electro-acoustic transducer/array. A beamformer is usually employed to concentrate the acoustic power into a beam, which may be swept to cover the required search angles. Generally, the electro-acoustic transducers are of the Tonpilz type and their design may be optimised to achieve maximum efficiency over the widest bandwidth, in order to optimise performance of the overall system. Occasionally, the acoustic pulse may be created by other means, e.g. (1) chemically using explosives, or (2) airguns or (3) plasma sound sources.
To measure the distance to an object, the time from transmission of a pulse to reception is measured and converted into a range by knowing the speed of sound. To measure the bearing, several hydrophones are used, and the set measures the relative arrival time to each, or with an array of hydrophones, by measuring the relative amplitude in beams formed through a process called beamforming. Use of an array reduces the spatial response so that to provide wide cover multibeam systems are used. The target signal (if present) together with noise is then passed through various forms of signal processing, which for simple sonars may be just energy measurement. It is then presented to some form of decision device that calls the output either the required signal or noise. This decision device may be an operator with headphones or a display, or in more sophisticated sonars this function may be carried out by software. Further processes may be carried out to classify the target and localise it, as well as measuring its velocity.
The pulse may be at constant frequency or a chirp of changing frequency (to allow pulse compression on reception). Simple sonars generally use the former with a filter wide enough to cover possible Doppler changes due to target movement, while more complex ones generally include the latter technique. Today, pulse compression is usually achieved using digital correlation techniques. Military sonars often have multiple beams to provide all-round cover while simple ones only cover a narrow arc. Originally the latter was often scanned around mechanically but this was a slow process.
Particularly when single frequency transmissions are used, the Doppler effect may be used to measure the radial speed of a target. The difference in frequency between the transmitted and received signal is measured and converted into a velocity. Since Doppler shifts can be introduced by either receiver or target motion, allowance has to be made for the radial speed of the searching platform.
One useful small sonar looks roughly like a waterproof flashlight. One points the head into the water, presses a button, and reads a distance. Another variant is a "fishfinder" that shows a small display with shoals of fish. Some civilian sonars approach active military sonars in capability, with quite exotic three-dimensional displays of the area near the boat. However, these sonars are not designed for stealth.
When active sonar is used to measure the distance from the transducer to the bottom, it is known as echo sounding. Similar methods may be used looking upward for wave measurement.
Active sonar is also used to measure distance through water between two sonar transducers or a combination of a hydrophone (underwater acoustic microphone) and projector (underwater acoustic speaker). A transducer is a device that can transmit and receive acoustic signals ("pings"). When a hydrophone/transducer receives a specific interrogation signal it responds by transmitting a specific reply signal. To measure distance, one transducer/projector transmits an interrogation signal and measures the time between this transmission and the receipt of the other transducer/hydrophone reply. The time difference, scaled by the speed of sound through water and divided by two, is the distance between the two platforms. This technique, when used with multiple transducers/hydrophones/projectors, can calculate the relative positions of static and moving objects in water.
In wartime, emission of an active pulse is so compromising for a submarine's stealth that it is considered a very severe breach of tactics.
A very directional, yet low-efficiency type of sonar (used by fisheries, military, and for port security) makes use of a complex nonlinear feature of the water known as non-linear sonar, the virtual transducer being known as a parametric array.
[edit] Project ARTEMIS
Project ARTEMIS was a one of a kind low frequency sonar for surveillance that was deployed off of Bermuda for several years in the early 1960s. The active portion was deployed from a World War II tanker, and the receive array was a built into a fixed position on an offshore bank.
[edit] Transponder
This is an active sonar device that receives a stimulus and immediately (or with a delay) retransmits the received signal or a predetermined one.
[edit] Performance prediction
A sonar target is small relative to the sphere, centred around the emitter, on which it is located. Therefore, the power of the reflected signal is very low, several orders of magnitude less than the original signal. Even if the reflected signal was of the same power, the following example (using hypothetical values) shows the problem: Suppose a sonar system is capable of emitting a 10,000 W/m² signal at 1 m, and detecting a 0.001 W/m² signal. At 100 m the signal will be 1 W/m² (due to the inverse-square law). If the entire signal is reflected from a 10 m² target, it will be at 0.001 W/m² when it reaches the emitter, i.e. just detectable. However, the original signal will remain above 0.001 W/m² until 300 m. Any 10 m² target between 100 and 300 m using a similar or better system would be able to detect the pulse but would not be detected by the emitter. The detectors must be very sensitive to pick up the echoes. Since the original signal is much more powerful, it can be detected many times further than twice the range of the sonar (as in the example).
In active sonar there are two performance limitations, due to noise and reverberation. In general one or other of these will dominate so that the two effects can be initially considered separately.
In noise limited conditions at initial detection:
SL − 2TL + TS − (NL − DI) = DT where SL is the source level, TL is the transmission loss (or propagation loss), TS is the target strength, NL is the noise level, DI is the directivity index of the array (an approximation to the array gain) and DT is the detection threshold.
In reverberation limited conditions at initial detection (neglecting array gain):
SL − 2TL + TS = RL + DT where RL is the reverberation level and the other factors are as before.
[edit] Marine mammals

A Humpback whale
Further information: Marine mammals and sonar
Active sonar may harm marine animals, although the precise mechanisms for this are not well understood. Some marine animals, such as whales and dolphins, use echolocation systems, sometimes called biosonar to locate predators and prey. It is conjectured that active sonar transmitters could confuse these animals and interfere with basic biological functions such as feeding and mating.
[edit] Hand-held sonar for use by a diver

Scuba diver using INSS hand-held sonar
- The LIMIS (= Limpet Mine Imaging Sonar) is a hand-held or ROV-mounted imaging sonar for use by a diver. Its name is because it was designed for patrol divers (combat frogmen or Clearance Divers) to look for limpet mines in low visibility water. Links:
- [1] Abstract of article by the International Society for Optical Engineering [4]
- [2] Used to find debris from the Space Shuttle Columbia crash
- [3] Used in fish passage research at hydropower facilities
- The LUIS (= Lensing Underwater Imaging System) is another imaging sonar for use by a diver. Links:
- [4] Used for counting salmon in a river
- There is or was a small flashlight-shaped handheld sonar for divers, that merely displays range.
- For the INSS = Integrated Navigation Sonar System see:
[edit] Passive sonar
Passive sonar listens without transmitting. It is often employed in military settings, although it is also used in science applications, e.g. detecting fish for presence/absence studies in various aquatic environments - see also passive acoustics and passive radar. In the very broadest usage, this term can encompass virtually any analytical technique involving remotely generated sound, though it is usually restricted to techniques applied in an aquatic environment.
[edit] Identifying sound sources
Passive sonar has a wide variety of techniques for identifying the source of a detected sound. For example, U.S. vessels usually operate 60 Hz alternating current power systems. If transformers or generators are mounted without proper vibration insulation from the hull or become flooded, the 60 Hz sound from the windings can be emitted from the submarine or ship. This can help to identify its nationality, as most European submarines have 50 Hz power systems. Intermittent sound sources (such as a wrench being dropped) may also be detectable to passive sonar. Until fairly recently, an experienced trained operator identified signals, but now computers may do this.
Passive sonar systems may have large sonic databases, but the sonar operator usually finally classifies the signals manually. A computer system frequently uses these databases to identify classes of ships, actions (i.e. the speed of a ship, or the type of weapon released), and even particular ships. Publications for classification of sounds are provided by and continually updated by the US Office of Naval Intelligence.
[edit] Noise limitations
Passive sonar on vehicles is usually severely limited because of noise generated by the vehicle. For this reason, many submarines operate nuclear reactors that can be cooled without pumps, using silent convection, or fuel cells or batteries, which can also run silently. Vehicles' propellers are also designed and precisely machined to emit minimal noise. High-speed propellers often create tiny bubbles in the water, and this cavitation has a distinct sound.
The sonar hydrophones may be towed behind the ship or submarine in order to reduce the effect of noise generated by the watercraft itself. Towed units also combat the thermocline, as the unit may be towed above or below the thermocline.
The display of most passive sonars used to be a two-dimensional waterfall display. The horizontal direction of the display is bearing. The vertical is frequency, or sometimes time. Another display technique is to color-code frequency-time information for bearing. More recent displays are generated by the computers, and mimic radar-type plan position indicator displays.
[edit] Performance prediction
Unlike active sonar, only one way propagation is involved. Because of the different signal processing used, the minimum detectable signal to noise ratio will be different. The equation for determining the performance of a passive sonar is:
SL − TL = NL − DI + DT where SL is the source level, TL is the transmission loss, NL is the noise level, DI is the directivity index of the array (an approximation to the array gain) and DT is the detection threshold. The figure of merit of a passive sonar is:
FOM = SL + DI − (NL + DT). [edit] Warfare
Modern naval warfare makes extensive use of sonar. The two types described before are both used, from various platforms, i.e. water-borne vessels, aircraft and fixed installations. The usefulness of active versus passive sonar depends on the radiated noise characteristics of the target, generally a submarine. Although in WW II active sonar was mainly used, except by submarines, with the advent of modern signal processing passive sonar was preferred for initial detection. As the submarines have become quieter, active operation is now more used. In 1987, a division of the Japanese company Toshiba reportedly sold the machinery to the Soviet Union that allowed it to mill the submarine propeller blades so that they became radically quieter, creating a huge security issue with their newer generation of submarines.
Active sonar is extremely useful sometimes, since it gives the exact bearing to a target (and sometimes the range). Active sonar works the same way as radar: a signal is emitted. The sound wave then travels in many directions from the emitting object. When it hits an object, the sound wave is then reflected in many other directions. Some of the energy will travel back to the emitting source. The echo will enable the sonar system or technician to calculate, with many factors such as the frequency, the energy of the received signal, the depth, the water temperature, etc., the position of the reflecting object. Active sonar is used when the platform commander determines that it is more important to determine the position of a possible threat submarine than it is to conceal his own position. With surface ships it might be assumed that the threat is already tracking the ship with satellite data. Any vessel around the emitting sonar will detect the emission. Having heard the signal, it is easy to identify the type of sonar (usually with its frequency) and its position (with the sound wave's energy). Moreover, active sonar, similar to radar, allows the user to detect objects at a certain range but also enables other platforms to detect the active sonar at a far greater range.
Since active sonar does not allow exact classification and is very noisy, this type of detection is used by fast platforms (planes, helicopters) and by noisy platforms (most surface ships) but very rarely by submarines. When active sonar is used by surface ships or submarines, it is typically activated very briefly at intermittent periods, to reduce the risk of detection by an enemy's passive sonar. As such, active sonar is normally considered a backup to passive sonar. In aircraft, active sonar is used in the form of disposable sonobuoys that are dropped in the aircraft's patrol area or in the vicinity of possible enemy sonar contacts.
Passive sonar has several advantages. Most importantly, it is silent. If the target radiated noise level is high enough, it can have a greater range than active sonar, and allows an identification of the target. Since any motorized object makes some noise, it may be detected eventually. It simply depends on the amount of noise emitted and the amount of noise in the area, as well as the technology used. To simplify, passive sonar "sees" around the ship using it. On a submarine, the nose mounted passive sonar detects in directions of about 270°, centered on the ship's alignment, the hull-mounted array of about 160° on each side, and the towed array of a full 360°. The invisible areas are due to the ship's own interference. Once a signal is detected in a certain direction (which means that something makes sound in that direction, this is called broadband detection) it is possible to zoom in and analyze the signal received (narrowband analysis). This is generally done using a Fourier transform to show the different frequencies making up the sound. Since every engine makes a specific noise, it is straightforward to identify the object. The classified databases of unique noises are part of what is known as acoustic intelligence or ACINT.
Another use of the passive sonar is to determine the target's trajectory. This process is called Target Motion Analysis (TMA), and the resultant "solution" is the target's range, course, and speed. TMA is done by marking from which direction the sound comes at different times, and comparing the motion with that of the operator's own ship. Changes in relative motion are analyzed using standard geometrical techniques along with some assumptions about limiting cases.
Passive sonar is stealthy and very useful. However, it requires high-tech components (band-pass filters, receivers), and it is costly. It is generally deployed on expensive ships in the form of arrays to enhance the detection. Surface ships use it to good effect; it is even better used by submarines, and it is also used by airplanes and helicopters, mostly to a "surprise effect", since submarines can hide under thermal layers. If a submarine's commander believes he is alone, he may bring his boat closer to the surface and be easier to detect, or go deeper and faster, and thus make more sound.
Examples of sonar applications in military use are given below. Many of the civil uses given in the following section may also be applicable to naval use.
[edit] Anti-submarine warfare

Variable Depth Sonar and its winch
Until recently, ship sonars were usually with hull mounted arrays, either amidships or at the bow. It was soon found after their initial use that a means of reducing flow noise was required. The first were made of canvas on a framework, then steel ones were used. Now domes are usually made of reinforced plastic or pressurised rubber. Such sonars are primarily active in operation. An example of a conventional hull mounted sonar is the SQS-56.
Because of the problems of ship noise, towed sonars are also used. These also have the advantage of being able to be placed deeper in the water. However, there are limitations on their use in shallow water. These are called towed arrays (linear) or variable depth sonars (VDS) with 2/3D arrays. A problem is that the winches required to deploy/recover these are large and expensive. VDS sets are primarily active in operation while towed arrays are passive.
An example of a modern active/passive ship towed sonar is Sonar 2087 made by Thales Underwater Systems.
[edit] Torpedoes
Modern torpedoes are generally fitted with an active/passive sonar. This may be used to home directly on the target, but wake following torpedoes are also used. An early example of an acoustic homer was the Mark 37 torpedo.
Torpedo countermeasures can be towed or free. An early example was the German Sieglinde device while the Pillenwerfer was a chemical device. A widely used US device was the towed Nixie while MOSS submarine simulator was a free device. A modern alternative to the Nixie system is the UK Royal Navy S2170 Surface Ship Torpedo Defence system.
[edit] Mines
Mines may be fitted with a sonar to detect, localize and recognize the required target. Further information is given in acoustic mine and an example is the CAPTOR mine.
[edit] Mine countermeasures
Mine Countermeasure (MCM) Sonar, sometimes called "Mine and Obstacle Avoidance Sonar (MOAS)", is a specialised type of sonar used for detecting small objects. Most MCM sonars are hull mounted but a few types are VDS design. An example of a hull mounted MCM sonar is the Type 2193 while the SQQ-32 Mine-hunting sonar and Type 2093 systems are VDS designs. See also Minesweeper (ship)
[edit] Submarine navigation
Main article: Submarine navigation
Submarines rely on sonar to a greater extent than surface ships as they cannot use radar at depth. The sonar arrays may be hull mounted or towed. Information fitted on typical fits is given in Oyashio class submarine and Swiftsure class submarine.
[edit] Aircraft
Helicopters can be used for antisubmarine warfare by deploying fields of active/passive sonobuoys or can operate dipping sonar, such as the AQS-13. Fixed wing aircraft can also deploy sonobuoys and have greater endurance and capacity to deploy them. Processing from the sonobuoys or dipping sonar can be on the aircraft or on ship. Helicopters have also been used for mine countermeasure missions using towed sonars such as the AQS-20A

AN/AQS-13 Dipping sonar deployed from an H-3 Sea King.
[edit] Underwater communications
Dedicated sonars can be fitted to ships and submarines for underwater communication. See also the section on the underwater acoustics page.
[edit] Ocean surveillance
For many years, the United States operated a large set of passive sonar arrays at various points in the world's oceans, collectively called Sound Surveillance System (SOSUS) and later Integrated Undersea Surveillance System (IUSS). A similar system is believed to have been operated by the Soviet Union. As permanently mounted arrays in the deep ocean were utilised, they were in very quiet conditions so long ranges could be achieved. Signal processing was carried out using powerful computers ashore. With the ending of the Cold War a SOSUS array has been turned over to scientific use.
In the United States Navy, a special badge known as the Integrated Undersea Surveillance System Badge is awarded to those who have been trained and qualified in its operation.
[edit] Underwater security
Sonar can be used to detect frogmen and other scuba divers. This can be applicable around ships or at entrances to ports. Active sonar can also be used as a deterrent and/or disablement mechanism. One such device is the Cerberus system.
See Underwater Port Security System and Anti-frogman techniques#Ultrasound detection.
[edit] Hand-held sonar
Limpet Mine Imaging Sonar (LIMIS) is a hand-held or ROV-mounted imaging sonar designed for patrol divers (combat frogmen or clearance divers) to look for limpet mines in low visibility water.
The LUIS is another imaging sonar for use by a diver.
Integrated Navigation Sonar System (INSS) is a small flashlight-shaped handheld sonar for divers that displays range.[5][6]
[edit] Intercept sonar
This is a sonar designed to detect and locate the transmissions from hostile active sonars. An example of this is the Type 2082 fitted on the British Vanguard class submarines.
[edit] Civilian applications
[edit] Fisheries
Fishing is an important industry that is seeing growing demand, but world catch tonnage is falling as a result of serious resource problems. The industry faces a future of continuing worldwide consolidation until a point of sustainability can be reached. However, the consolidation of the fishing fleets are driving increased demands for sophisticated fish finding electronics such as sensors, sounders and sonars. Historically, fishermen have used many different techniques to find and harvest fish. However, acoustic technology has been one of the most important driving forces behind the development of the modern commercial fisheries.
Sound waves travel differently through fish than through water because a fish's air-filled swim bladder has a different density than seawater. This density difference allows the detection of schools of fish by using reflected sound. Acoustic technology is especially well suited for underwater applications since sound travels farther and faster underwater than in air. Today, commercial fishing vessels rely almost completely on acoustic sonar and sounders to detect fish. Fishermen also use active sonar and echo sounder technology to determine water depth, bottom contour, and bottom composition.

Cabin display of a fish finder sonar
Companies such as Raymarine UK, Marport Canada, Wesmar, Furuno, Krupp, and Simrad make a variety of sonar and acoustic instruments for the deep sea commercial fishing industry. For example, net sensors take various underwater measurements and transmit the information back to a receiver onboard a vessel. Each sensor is equipped with one or more acoustic transducers depending on its specific function. Data is transmitted from the sensors using wireless acoustic telemetry and is received by a hull mounted hydrophone. The analog signals are decoded and converted by a digital acoustic receiver into data which is transmitted to a bridge computer for graphical display on a high resolution monitor.
[edit] Echo sounding
An echo-sounder sends an acoustic pulse directly downwards to the seabed and records the returned echo. The sound pulse is generated by a transducer that emits an acoustic pulse and then “listens” for the return signal. The time for the signal to return is recorded and converted to a depth measurement by calculating the speed of sound in water. As the speed of sound in water is around 1,500 metres per second, the time interval, measured in milliseconds, between the pulse being transmitted and the echo being received, allows bottom depth and targets to be measured.
The value of underwater acoustics to the fishing industry has led to the development of other acoustic instruments that operate in a similar fashion to echo-sounders but, because their function is slightly different from the initial model of the echo-sounder, have been given different terms.
[edit] Net location
The net sounder is an echo sounder with a transducer mounted on the headline of the net rather than on the bottom of the vessel. Nevertheless, to accommodate the distance from the transducer to the display unit, which is much greater than in a normal echo-sounder, several refinements have to be made. Two main types are available. The first is the cable type in which the signals are sent along a cable. In this case there has to be the provision of a cable drum on which to haul, shoot and stow the cable during the different phases of the operation. The second type is the cable less net-sounder – such as Marport’s Trawl Explorer - in which the signals are sent acoustically between the net and hull mounted receiver/hydrophone on the vessel. In this case no cable drum is required but sophisticated electronics are needed at the transducer and receiver.
The display on a net sounder shows the distance of the net from the bottom (or the surface), rather than the depth of water as with the echo-sounder's hull-mounted transducer. Fixed to the headline of the net, the footrope can usually be seen which gives an indication of the net performance. Any fish passing into the net can also be seen, allowing fine adjustments to be made to catch the most fish possible. In other fisheries, where the amount of fish in the net is important, catch sensor transducers are mounted at various positions on the cod-end of the net. As the cod-end fills up these catch sensor transducers are triggered one by one and this information is transmitted acoustically to display monitors on the bridge of the vessel. The skipper can then decide when to haul the net.
Modern versions of the net sounder, using multiple element transducers, function more like a sonar than an echo sounder and show slices of the area in front of the net and not merely the vertical view that the initial net sounders used.
The sonar is an echo-sounder with a directional capability that can show fish or other objects around the vessel.good
[edit] Ship velocity measurement
Sonars have been developed for measuring a ship's velocity either relative to the water or to the bottom.
[edit] ROV and UUV
Small sonars have been fitted to Remotely Operated Vehicles (ROV) and Unmanned Underwater Vehicles (UUV) to allow their operation in murky conditions. These sonars are used for looking ahead of the vehicle. The Long-Term Mine Reconnaissance System is an UUV for MCM purposes.
[edit] Vehicle location
Sonars which act as beacons are fitted to aircraft to allow their location in the event of a crash in the sea. Short and Long Baseline sonars may be used for caring out the location, such as LBL.
[edit] Scientific applications
[edit] Biomass estimation
Main article: Bioacoustics
Detection of fish, and other marine and aquatic life, and estimation their individual sizes or total biomass using active sonar techniques. As the sound pulse travels through water it encounters objects that are of different density or acoustic characteristics than the surrounding medium, such as fish, that reflect sound back toward the sound source. These echoes provide information on fish size, location, abundance and behavior. Data is usually processed and analysed using a variety of software such as Echoview. See Also: Hydroacoustics and Fisheries Acoustics.
[edit] Wave measurement
An upward looking echo sounder mounted on the bottom or on a platform may be used to make measurements of wave height and period. From this statistics of the surface conditions at a location can be derived.
[edit] Water velocity measurement
Special short range sonars have been developed to allow measurements of water velocity.
[edit] Bottom type assessment
Sonars have been developed that can be used to characterise the sea bottom into, for example, mud, sand, and gravel. Relatively simple sonars such as echo sounders can be promoted to seafloor classification systems via add-on modules, converting echo parameters into sediment type. Different algorithms exist, but they are all based on changes in the energy or shape of the reflected sounder pings. Advanced substrate classification analysis can be achieved using calibrated (scientific) echosounders and parametric or fuzzy-logic analysis of the acoustic data (See: Acoustic Seabed Classification)
[edit] Bottom topography measurement
Side-scan sonars can be used to derive maps of the topography of an area by moving the sonar across it just above the bottom. Low frequency sonars such as GLORIA have been used for continental shelf wide surveys while high frequency sonars are used for more detailed surveys of smaller areas.
[edit] Sub-bottom profiling
Powerful low frequency echo-sounders have been developed for providing profiles of the upper layers of the ocean bottom.
[edit] Synthetic aperture sonar
Various synthetic aperture sonars have been built in the laboratory and some have entered use in mine-hunting and search systems. An explanation of their operation is given in synthetic aperture sonar.
[edit] Parametric sonar
Parametric sources use the non-linearity of water to generate the difference frequency between two high frequencies. A virtual end-fire array is formed. Such a projector has advantages of broad bandwidth, narrow beamwidth, and when fully developed and carefully measured it has no obvious sidelobes: see Parametric array. Its major disadvantage is very low efficiency of only a few percent.[7]. P.J. Westervelt's seminal 1963 JASA paper summarizes the trends involved.
[edit] See also
- Acoustic Doppler Current Profiler
- Acoustic Tags
- Animal echolocation
- Baffles (submarine)
- Beached whale
- Beamforming
- Bistatic sonar
- Fish finder
- Hydroacoustics
- Ocean acoustic tomography
- Radar
- Passive Radar
- Scientific Echosounder
- Side-scan sonar
- SOFAR channel
- Sonar 2087
- Sonobuoy
- Sound
- Submarine navigation
- Synthetic aperture sonar
- Towed array sonar
- Underwater acoustics
- Upward looking sonar
[edit] Notes
- ^ Hendrick, Burton J. (August 1914). "Wireless Under The Water: A Remarkable Device That Enables A Ship's Captain To Determine The Exact Location Of Another Ship Even In The Densest Fog". The World's Work: A History of Our Time XLIV (2): 431–434. The World's work - Google Books. Retrieved 2009-08-04.
- ^ The Rotary Bowcap
- ^ W Hackmann, Seek & Strike: Sonar, anti-submarine warfare and the Royal Navy 1914-54 (HMSO, London, 1984)
- ^ Proc. SPIE Vol. 3711, p. 2-10, Information Systems for Navy Divers and Autonomous Underwater Vehicles Operating in Very Shallow Water and Surf Zone Regions, Jody L. Wood; Ed. SPIE: Conferences & Publications on Photonics, Optics, & Imaging
- ^ Lent, K (2002). "Very High Resolution Imaging Diver Held Sonar". Report to the Office of Naval Research. Rubicon Research Repository: Item 123456789/7497. Retrieved 2008-08-11.
- ^ Krueger, Kenneth L. (2003-05-05). "Diver Charting and Graphical Display". Texas Univ at Austin Applied Research Labs. Rubicon Research Repository: Item 123456789/7498. Retrieved 2009-01-21.
- ^ H O Berktay, Some Finite Amplitude Effects in Underwater Acoustics in V M Albers "Underwater Acoustics" 1967
[edit] Bibliography
- Hackmann, Willem D. Seek & Strike: Sonar, Anti-submarine Warfare, and the Royal Navy, 1914–54. (London: HMSO, 1984).
- Hackmann, Willem D. "Sonar Research and Naval Warfare 1914–1954: A Case Study of a Twentieth-Century Science". Historical Studies in the Physical and Biological Sciences 16#1 (1986) 83–110.
- Urick, R. J. Principles of Underwater Sound, 3rd edition. (Peninsula Publishing, Los Altos, 1983).
Fisheries Acoustics References
- Fisheries Acoustics Research (FAR) at the University of Washington Fisheries Acoustics Research - Main
- NOAA Protocols for Fisheries Acoustics Surveys http://www.st.nmfs.gov/st4/protocol/..._protocols.pdf
- Acoustics Unpacked—A "how to" great reference for freshwater hydroacoustics for resource assessment
- "ACOUSTICS IN FISHERIES AND AQUATIC ECOLOGY" Archives Web Ifremer
- "Hydroacoustic Protocol - Lakes, Reservoirs and Lowland Rivers" (for fish assessment) http://www.pnamp.org//web/workgroups...tics-Lakes.doc
- Simmonds, E. John, and D. N. MacLennan. Fisheries Acoustics: Theory and Practice, second edition. Fish and aquatic resources series, 10. Oxford: Blackwell Science, 2003. ISBN 9780632059942.
[edit] Further reading
- Time Magazine. Canada: Stable Sonics, Time Magazine, October 28, 1946. An interesting account of the 4,800 ASDIC sonar devices secretly manufactured at Casa Loma, Toronto, during World War II. Retrieved 25 Sept. 2009.
[edit] External links
* Profiling Sonar: Inspecting In-Service, Submerged Pipes
- Sonars and the marine environment by Norwegian Defence Research Establishment (FFI)
- Single Beam Sonars
[hide] Hydroacoustics
Sonar Acoustic Doppler Current Profiler · Baffles (submarine) · Bistatic sonar · Echo sounding · GLORIA sidescan sonar · Scientific Echosounder · Side-scan sonar · Sonar 2087 · Sonar beamforming · Sonobuoy · Surveillance Towed Array Sensor System · Synthetic aperture sonar · Towed array sonar · Upward looking sonar
Ocean acoustics Ocean acoustic tomography · Sofar bomb · SOFAR channel · Underwater acoustics
Acoustic ecology Acoustic tags · Animal echolocation · Beached whale · Bioacoustics · Biophony · Fishfinder · Fisheries acoustics · Marine mammals and sonar · Noise map · Soundscape · Whale song
You should definitely check out LowCostLinks.com, they sell the highest quality links on the internet.

 پاسخ با نقل قول
پاسخ با نقل قول