-
 مدیر بازنشسته
مدیر بازنشسته
 انواع طراحي ها و سيستم هاي كنترل موشك ها
انواع طراحي ها و سيستم هاي كنترل موشك ها
تصويري از انواع پيكربندي ايروديناميكي چهر گروه از موشك ها:
1)كنترل با بال(Wing Control)
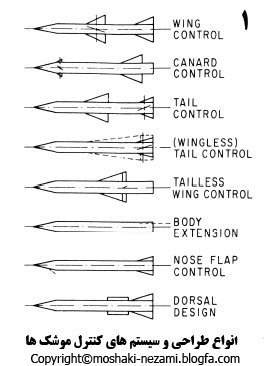
اين نوع پيكربندي,مركب از سطحي نسبتا بزرگ است كه در فاصله كمي از مركز ثقل موشك قرار مي گيرد.در اين نوع پيكربندي نياز به يك مجموعه متعادل كننده در قسمت هاي انتهاي بدنه موشك داريم.
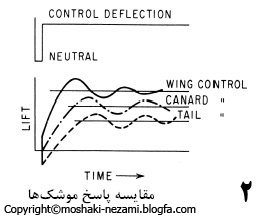
اين نوع سيستم كنترل مهمولا در موشك هاي(AAM) بكار گرفته مي شود زيرا خصوصيات پاسخ سريع
از لحاظ كنترل را دارد.بطوري كه در شكل زير نشان داده شده است نيروي برآ(Lift) در اثر تغيير در اثر زاويه كنترل فورا تغيير مي نمايد و باعث مانور موشك مي شود.براي اضافي در اثر تغيير زاويه حم بوجود مي ايد.كنترل موثر بالها(گشتاور Pitching و يا Turning در اثر تغيير مكان سطوح كنترل) عموما خيلي كم است.بنابر اين حركت مكاني نيروي برآ در محدوده بسته اي از مركز ثقل انجام مي گيرد,به همين علت يك نيروي رو به پايين در قسمت دم در اثر دانواش بال بوجود مي آيد كه از لحاظ گشتاور(Turning)
براي ايجاد برآي اضافي مطلوبست.سودمندي اين دانواش بر روي سطوح كنترل در شكل زير نشان داده شده است.
محل نصب بال در طراحي موشك نوع بال كنترل,بسيار بحراني است,بويژه در حالتي كه محدوده تغيير مكان مركز ثقل در حالت پرتاب و در اخرين لحظات روشن بودن موتور Burn-out زياد باشد اين حالت رخ مي دهد از اين رو سطوح بال عموما در محدوده بسيار نزديكي از مركز ثقل حالت پرتاب قرار مي دهند و اين به علت ايجاد تعادل استاتيكي مطلوب با داشتن ابعاد كوچك مجموعه دم است.تاثير حركت مركز ثقل به طرف جلو,كاهش تاثير سطوح كنترلي و در نتيجه مانور پذيري بر حسب كج شدن بال است بطوريه در شكل زير ملاحظه مي كنيد.
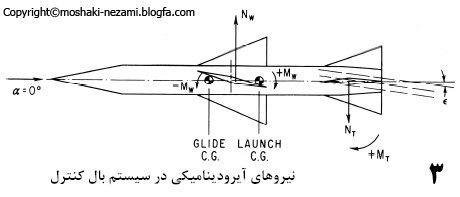
به دليل افزايش برآ در اثر تغيير وضعيت بال نياز به زاويه جمله كمتر تعادل و همچنين ضريب باري
(Load Factor) كمتر نسبت به طراحي نوع دم كنترل دارد.اين مقدار كم زاويه حمله تعادل(Trim Angle of Attack),مريت ويژه اي از نظز طراحي ورودي هواي موتورهاي تنفسي و سيستم هاي هدايت جستجوگر دارد,همچنين به دليل بزرگي بال,گشتاورد لولاي(Hinge Moment) زيادي توليد مي شود.
از اين رو براي انتخاب و نصب خط لولا,اناليز بهينه دقيقي بايد انجام داد تا در كل محدوده اعداد ماخ پروزاي,توان كمكي حداقل نياز داشته باشيم.براي ايجاد كنترل عرضي بوسيله تركيبي از حركات جزيي بال در جهت(Pitch) و (Yaw) امكان پذير مي گردد به همين علت نياز به سيستم كنترل وجود دارد كه قبل از بكار بردن اين نوع سيستم ها بايد بطور دقيق مورد ملاحظه قرار گيرند و از جمله آنها ميتوان به موارد زير اشاره كرد:
1-افت شدبد بهره كنترل دم در اثر قرار گرفتن در دانواش براي شركت درتعادل استاتيكي
2-نتايج غير خطي آيروديناميكي دانواش در اثر تغيير وضعيت بال و زاويه حمله)
3-در اثر تركيب شدن اثرات زاويه حمله و تغيير وضعيت بلا گشتاوردهاي(Rolling) مخالفي در سطوح دم ايجاد مي گردد.
2-سيستم كنترل كاناردي(Canard Control)
پيكربندي كانارد شامل سطوح كوچكي هستند كه درست در قسمت جلوي بدنه موشك قرار مي گيرند و سطوح ديگر نظير بال يا دم به ترتيب در قسمت مياني و انتهاي بدنه نصب مي شوند.
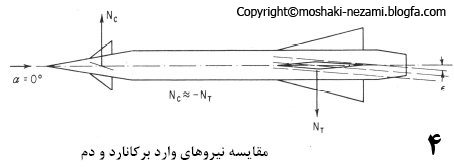
بدليل كوچكي اندازه سطوح كانارد در مقايسه با پيكربندي معمولي(بال),دانواش قابل توجهي ايجاد نمي كند بنابر اين در مشخصات تعادل طولي اثرات مخالفي ايجاد نمينمايد.
بدين ترتيب حاشيه پايداري استاتيكي بزرگي با تغيير مكان بال به راحتي حاصل مي آيد.كل نيروي برآدر اين نوع پيكربندي در اثر زاويه حمله بوجود مي آيد زيرا برآيي كه كانارد توليد مي نمايد باعث ايجاد يك نيروي بطرف پايين در بال مي گردد.اين موضوع در شكل بالا مشخص شده است.
موضوع بسيار جالبي كه در پيكربندي كانارد مطرح است سادگي ذاتي آنست,بعلاوه تغيير در ماكن مركز ثقل در اثر تغيير طراحي ممكن است كه بسادگي قابل تطبيق با مكان جديد بال باشد همچنين به دليل كوچكي ابعاد سطوح توليد برآ,پساي كلي و وزن موشك نيز كم است.بعضي از معايب اصلي پيكربندي كانارد عبارتند از:
1-ايجاد تعادل در زوان مشكل است چون كانارد ابعادشان كوچك است و اثر دانواش كمي بر بال دارند در نتيجه روش پيچيده اي براي كنترل رول مورد نياز است(نظير استفاده از كنترلها در قسمت نوك بال).
2-بطور نسبي احتياج به ميزان سرعت سطوح كنترلي بالايي دارد تا نرخ پاسخ مطلوبي را بدهد چونكه برآي مورد نياز در اثر زاويه حمله ايجاد مي گردد,همان طور كه در شكل شماره 2 مي بيند.نرخ بالاي سرعت مورد نياز سطوح كنترلي,افزايش در قدرت سروها را طلب مي كند اگر چه اين قدرت مورد بحث در مقايسه با سروهايي كه در سيستم بال كنترل بكار ميروند قدرت كمتري دارد از اين رو براي موشك هاي نسبتا كوچك كه نياز به تثبيت در رول وجود ندارد,پيكربندي كانارد شايد بهترين پيكربندي باشد.
کلمات کلیدی این موضوع
 مجوز های ارسال و ویرایش
مجوز های ارسال و ویرایش
- شما نمیتوانید موضوع جدیدی ارسال کنید
- شما امکان ارسال پاسخ را ندارید
- شما نمیتوانید فایل پیوست کنید.
- شما نمیتوانید پست های خود را ویرایش کنید
-
مشاهده قوانین
انجمن



 پاسخ با نقل قول
پاسخ با نقل قول